Johdatus tekoälyn taustalla olevaan matematiikkaan (Heli Tuominen)
Yleistä tietoa kurssista ja luentokalvot löytyvät kurssin kotisivulta.
Kiinnostaako tekoäly? Miten koneet oppivat? Kurssilla tutustutaan koneoppimiseen, lähinnä neuroverkkoihin ja niiden toiminnan takana olevaan matematiikkaan. Neuroverkkojen opettamisessa käytetyn virhefunktion minimoinnissa tarvitaan differentiaalilaskentaa ja suurten datamäärien käsittelyssä matriisilaskentaa. Kurssilla opiskellaan näiden alojen perusasioita. Lisäksi kurssilla tutustutaan Python-kieleen.
| activation function | aktivointifunktio |
| artificial intelligence (AI) | tekoäly |
| artificial neural network (ANN) | (keinotekoinen) neuroverkko |
| backpropagation | vastavirta(-algoritmi) |
| bias | vakiotermi |
| binary classification | luokittelu kahteen luokkaan |
| classification | luokittelu |
| clustering | klusterointi, ryhmittely |
| cost function | virhefunktio |
| cross-entropy | ristientropia |
| decision tree | päätöspuu |
| gradient descent | gradienttimenetelmä |
| data maining | tiedonlouhinta |
| decision boundary | päätöspinta |
| deep learning | syväoppiminen |
| feed forward network | eteenpäin kytketty verkko |
| hidden layer | piilokerros |
| input layer | syötekerros |
| k-nearest neighbors algorithm (kNN) | k:n lähimmän naapurin menetelmä |
| learning rate | oppimisnopeus |
| logistic regression | logistinen regressio |
| loss function | tappiofunktio |
| machine learning | koneoppiminen |
| mean squared error | keskineliösumma |
| multiclass classification | luokittelu moneen luokkaan |
| output leyer | ulostulokerros |
| perceptron | perseptroni |
| regression | regressio |
| self-organizing Map | itseorganisoituva kartta |
| supervised learning | ohjattu oppiminen |
| support vector machine | tukivektorikone |
| test example | testiesimerkki |
| training example | opetusesimerkki |
| unsupervised learning | ohjaamaton oppiminen |
| validation example | vahvistusesimerkki |
| assosiative | liitännäinen |
| bounded | rajoitettu |
| chain rule | ketjusääntö |
| closed | suljettu |
| coefficient | kerroin |
| column | sarake |
| commutative | vaihdannainen |
| composite function | yhdistetty funktio |
| continuos | jatkuva |
| contour curve | korkeuskäyrä |
| curve | käyrä |
| decreasing | vähenevä |
| derivative | derivaatta |
| diagonal matrix | diagonaalimatriisi |
| differentiable | derivoituva, differentioituva |
| domain | lähtöjoukko |
| dot/inner/scalar product | sisätulo, pistetulo |
| eigenvalue | ominaisarvo |
| eigenvector | ominaisvektori |
| function | funktio |
| gradient | gradientti |
| graph | kuvaaja, graafi |
| identity matrix | yksikkömatriisi, identtinen matriisi |
| increasing | kasvava |
| interval | väli |
| inverse matrix | käänteismatriisi |
| invertible | kääntyvä |
| level curve, level set | tasa-arvokäyrä, tasa-arvojoukko |
| limit | raja-arvo |
| linearly separable | lineaarisesti erotettavat |
| lower triangular matrix | alakolmiomatriisi |
| matrix | matriisi |
| partial derivative | osittaisderivaatta |
| plane | taso |
| range | arvojoukko, kuvajoukko |
| row | rivi |
| saddle point | satulapiste |
| solution | ratkaisu |
| tangent | tangentti |
| target set | maalijoukko |
| unbounded | rajoittamaton |
| upper triangular matrix | yläkolmiomatriisi |
| vector | vektori |
| vector field | vektorikenttä |
1. Koneoppiminen (Machine learning)
Koneoppiminen on tekoälyn osa-alue, jossa kone/ohjelma oppii pohjatiedon ja käyttäjän toiminnan perusteella. Kaikkia erilaisia tilanteita varten ei ole erillistä ohjetta vaan oppiminen tapahtuu kokemuksen avulla.
Mitchell 1997: A computer program is said to learn from experience E with respect to some class of tasks T and performance measure P if its performance at tasks in T, as measured by P, improves with experience E.
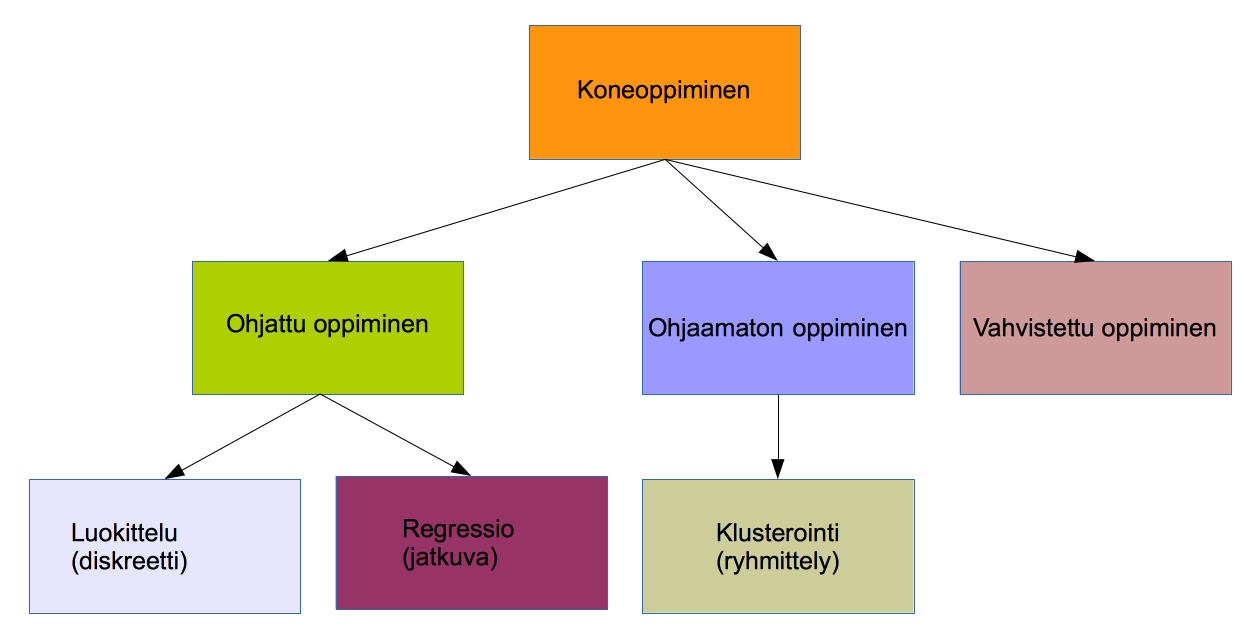
Koneoppiminen voidaan jakaa kolmeen luokkaan oppimisen tyylin perusteella.
Ohjattu oppiminen: Konetta opetetaan luokitellun aineiston (syöte-tavoite-parit) avulla. Tavoitteena on, että kone osaa tehdä luokittelun samankaltaiselle aineistolle. Ohjattu oppiminen voidaan jakaa tavoitedatan luonteen perusteella kahteen luokkaan, luokittelu ja regressio. Jos syötteet voidaan luokitella erillisiin ryhmiin, niin kyse on luokittelusta, jos se on jatkuvaa, niin regressiosta. Esimerkki luokittelusta on käsinkirjoitettujen numeroiden tunnistus ja regressiosta jonkin tuotteen hinta.
Ohjaamaton oppiminen: Jäljittelee ihmisen oppimista. Opettamiseen käytetään raakadataa, josta kone pyrkii löytämään samankaltaisuuksia ja suhteita eri syötteiden välille. Syötteet pyritään ryhmittelemään niin, että yksittäisellä syötteellä on enemmän samanlaisia ominaisuuksia samaan ryhmään kuuluvien syötteiden kuin muihin ryhmiin kuuluvien syötteiden kanssa. Esimerkki ohjaamattomasta oppimisesta on akateemikko Teuvo Kohosen (1934) 1980-luvulla kehittämä itseorganisoituva kartta.
Vahvistettu oppiminen Kone oppii ympäristön antaman palautteen perusteella. Kone saa toiminnastaan dynaamisessa ympäristössä positiivista ja negatiivista palautetta ja oppii toimimaan niin, positiivisen palautteen määrä kasvaa ja negatiivisen vähenee. Esimerkkejä vahvistetusta oppimisesta ovat itseohjautuvat autot ja robotiikka.
Kuhunkin oppimistyyliin sopivia algoritmeja on useita. Ratkaistavana olevaan ongelmaan sopivan algoritmin valinta riippuu oppimistyylin lisäksi esimerkiksi datan koosta ja tyypistä, algoritmin oppimisnopeudesta ja opetuksessa tarvittavasta tallennustilasta ja siitä, kuinka tehokasta tai yleistettävää ratkaisua ollaan etsimässä. Paras algoritmi ei välttämättä löydy ensimmäisellä kokeilulla.
Tällä kurssilla käsitellään pääasiassa ohjattua oppimista neuroverkkojen avulla. Ennen neuroverkkoihin siirtymistä tutustutaan hyvin lyhyesti muutamaan muuhun ohjatun oppimisen algoritmiin.
Ohjatun oppimisen luokittelu voi olla binääristä luokittelua tai luokittelua useampaan luokkaan. Binäärisessä luokittelussa mahdollisia luokkia, joihin yksittäinen datan alkio voi kuulua, on kaksi. Esimerkiksi sähköposti on roskapostia tai oikeaa postia ja vain kissojen ja koirien kuvia sisältävässä joukossa jokainen kuva on joko kissan tai koiran kuva, ei molempia. Jotkut algoritmit, kuten logistinen regressio, on suunniteltu erityisesti binääriseen luokitteluun ja ne ovat tehtävässään tehokkaita. Useampaan luokkaan luokittelu vaatii monimutkaisemman algoritmin.
Luokittelualgoritmeja
- Logistinen regressio: Sopii binääriseen luokitteluun. Malli kertoo, millä todennäköisyydellä datapiste kuuluu ongelmassa oleviin luokkiin. Se sopiii parhaiten tilanteisiin, jossa data voidaan erottaa lineaarisesti (suoralla, hypertasolla).
- k:n lähimmän naapurin menetelmä: K:n lähimmän naapurin menetelmässä datapisteet (opetusesimerkit) ovat pisteitä
 -ulotteisessa avaruudessa. Jokaiselle datapisteelle etsitään euklidisen (tai muun) etäisyyden mielessä K lähintä pistettä ja datapiste luokitellaan naapureiden luokkien avulla käyttäen esimerkiksi keskiarvoa regression ja moodia luokittelun tapauksessa. Koko data on kerralla muistissa.
-ulotteisessa avaruudessa. Jokaiselle datapisteelle etsitään euklidisen (tai muun) etäisyyden mielessä K lähintä pistettä ja datapiste luokitellaan naapureiden luokkien avulla käyttäen esimerkiksi keskiarvoa regression ja moodia luokittelun tapauksessa. Koko data on kerralla muistissa. - Tukivektorikone: Tukivektorikoneen perusversiota käytetään binääriseen luokitteluun. Se luokittelee dataa etsimällä lineaarista päätöspintaa (hypertasoa), joka erottaa kahteen eri luokkaan kuuluvat datapisteet toisistaan. Jos data on lineaarisesti erotettava, niin paras erotteleva hypertaso on se, joka erottelee luokat toisistaan suurimmalla marginaalilla. Jos data ei ole lineaarisesti erotettava, niin väärällä puolella hypertasoa oleville pisteille käytetään virhefunktiota.
- Naiivi Bayes-luokittelija: Naiivi Bayes-luokittelija on yksinkertainen luokittelija, joka käsittelee alkioiden ominaisuuksia toisistaan riippumattomina. Luokittelu tehdään todennäköisyyksien avulla. Se on helppo toteuttaa ja hyvä menetelmä pienehkölle datalle, jossa on useita parametreja.
- Diskriminanttianalyysi Diskriminattianalyysi luokittelee dataa etsimällä sellaisia ominaisuuksien lineaarikombinaatioita, jotka joko karakterisoivat tai erottavat eri luokkiin kuuluvia datapisteitä. Diskriminantissa analyysissä oletetaan, että eri luokat noudattavat normaalijakaumaa. Opetettaessa etsitään normaalijakauman parametreja eri luokille ja niiden avulla etsitään luokkia erottavat lineaariset tai kvadraattiset funktiot.
- Päätöspuut Päätöspuu on helposti toteutettava ja vähän muistia käyttävä luokittelualgoritmi. Luokittelu tehdään valitsemalla luokiteltavan data-alkion ominaisuuksien perusteella binääripuun solmuissa vasen tai oikea haara. Datapiste viedään ensin juurisolmuun, josta se lopulta päätyy lehteen, joka kertoo luokan.
- Neuroverkot Ihmisen aivojen toimintaa jäljitteleviä oppivia verkkoja käsitellään seuraavissa luvuissa tarkemmin.
Lisätietoa koneoppimisesta
- T.Kohonen: MATLAB Implementations and Applications of the Self-Organizing Map
- R.S. Sutton ja A.G. Barto: Reinforcement Learning, An Introduction
- Y. Zhang: New Advances in Machine Learning
- Machine Learning Mastery: Your First Machine Learning Project in Python Step-By-Step
- Machine Learning Mastery: Machine Learning Algorithms
- H. Daumé: A Course in Machine Learning (University on Maryland)
- Decision Trees (Scikit learn)
- A Complete Tutorial on Tree Based Modeling from Scratch in R and Python
- Machine Learning Mastery: How To Implement The Decision Tree Algorithm From Scratch In Python
- Python and Machine Learning
2. Keinotekoiset neuroverkot (Artificial neural networks)
Keinotekoinen neuroverkko jäljittelee ihmisen aivoja. Se koostuu syöte- ja ulostulokerroksesta ja niiden välissä olevista piilokerroksista.
Neuroverkkoa voi ajatella funktiona  ; syöte on -ulotteinen vektori
; syöte on -ulotteinen vektori ") , piilokerrokset hoitavat laskutehtävän ja funktion arvo
, piilokerrokset hoitavat laskutehtävän ja funktion arvo =y=(y_1,y_2,\dots,y_m)\in\mathbb R^m") saadaan ulostulokerroksesta. Verkon käyttötarkoitus määrää, miten funktion arvo
saadaan ulostulokerroksesta. Verkon käyttötarkoitus määrää, miten funktion arvo  tulkitaan.
tulkitaan.
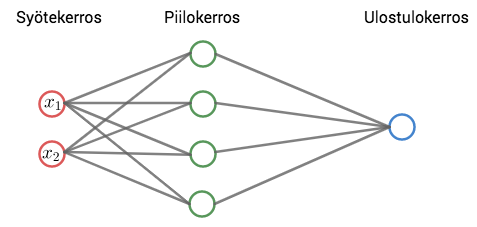
Piilokerroksien ja ulostulokerroksen jokaisessa neuronissa lasketaan syötekerroksesta tai piilokerroksesta tulleiden syötteiden painotettu summa ja siihen lisätään neuronin vakiotermi. Ennen neuronin tuloksen lähettämistä seuraavalle neuronille summa viedään aktivointifunktioon. Aktivointifunktiot muuttavat lineaarisen (affiinin eli ensimmäisen asteen polynomin) syötteen epälineaariseksi.
Esimerkki
Verkossa on yksi piilokerros, jossa on neljä neuronia. Syöte on vektori \in\mathbb R^2") . Ulostulokerroksessa on yksi neuroni.
. Ulostulokerroksessa on yksi neuroni.
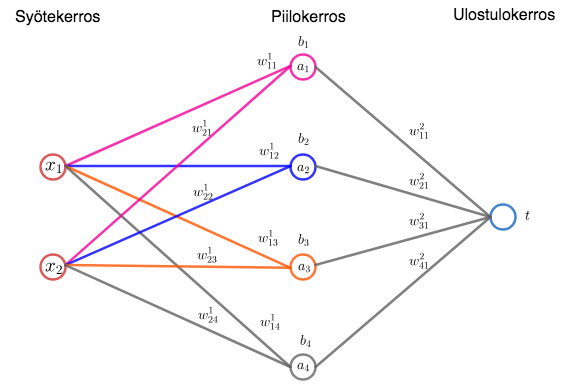 Syötevektorin komponentit kerrotaan piilokerroksen neuroneiden painoilla
Syötevektorin komponentit kerrotaan piilokerroksen neuroneiden painoilla  , lasketaan yhteen ja summaan lisätään piilokerroksen neuronin
, lasketaan yhteen ja summaan lisätään piilokerroksen neuronin  vakiotermi
vakiotermi  :
:  Nämä summat viedään piilokerroksen aktivointifunktiolle, jolloin piilokerroksen neuronien antamat syötteet ulostulokerrokselle ovat
Nämä summat viedään piilokerroksen aktivointifunktiolle, jolloin piilokerroksen neuronien antamat syötteet ulostulokerrokselle ovat , a_2=\varphi(z_2), a_3=\varphi(z_3)\text{ ja }a_4=\varphi(z_4).") Verkon antama tulos saadaan käyttämällä piilokerroksen ja ulostulokerroksen välisiä painoja ja aktivointifunktiota (ulostulokerroksen vakiotermi on nolla):
Verkon antama tulos saadaan käyttämällä piilokerroksen ja ulostulokerroksen välisiä painoja ja aktivointifunktiota (ulostulokerroksen vakiotermi on nolla): =\varphi\Big(\sum_{i=1}^4w^2_{i1}a_i\Big).")
2.1 Neuroverkkoihin liittyviä määritelmiä ja merkintöjä
Neuroneihin liittyvistä parametreistä käytetään seuraavia merkintöjä. Kerrosindeksi  viittaa syötekerrokseen ja kerrosindeksi
viittaa syötekerrokseen ja kerrosindeksi  ulostulokerrokseen:
ulostulokerrokseen:
 kerroksen
kerroksen  neuronien lukumäärä,
neuronien lukumäärä, kerroksen
kerroksen  neuronin ja kerroksen neuronin
neuronin ja kerroksen neuronin  välillä oleva paino,
välillä oleva paino, kerroksen neuronin vakiotermi,
kerroksen neuronin vakiotermi, kerroksen neuronia vastaava summa
kerroksen neuronia vastaava summa 
 kerroksen neuronin tulos eli syöte seuraavaan kerrokseen
kerroksen neuronin tulos eli syöte seuraavaan kerrokseen =\varphi\Big(\sum_{i=1}^{N_{l-1}}w_{ij}^la_i^{l-1}+b_j^l\Big),")
missä  on aktivointifunktio (joka voi vaihdella kerroksesta toiseen).
on aktivointifunktio (joka voi vaihdella kerroksesta toiseen).
Olisi kiva, jos tässä w:n indeksinä l käytettäisiin samaa indeksiä kuin edellisessä esimerkissä, tai päinvastoin.
—Neuroni
Piilokerroksen neuronit voidaan tulkita funktioiksi  ,
,  ,
, =(\varphi_l(g_j^l(v)),\dots,\varphi_l(g_j^l(v))),") missä
missä  on yleensä edellisen kerroksen painotettu summa lisättynä vakiotermillä eli
on yleensä edellisen kerroksen painotettu summa lisättynä vakiotermillä eli =\sum_{i=1}^{N_{l-1}}w_{ij}^lv_i+b_j^l") ja
ja  on kerroksen aktivointifunktio. Ulostulokerroksen funktioille
on kerroksen aktivointifunktio. Ulostulokerroksen funktioille  arvojoukko on
arvojoukko on  .
.
Kaavat vektorimuodossa
Merkintöjen yksinkertaistamiseksi kaavat kirjoitetaan monesti vektori- ja matriisimuodossa, joilloin kerroksen vakiotermejä vastaa vektori ,") kerroksen neuronien painotettuja summia vektori
kerroksen neuronien painotettuja summia vektori ,") ja kerroksen neuronien tuloksia vektori
ja kerroksen neuronien tuloksia vektori .") Kerroksen painoja vastaa
Kerroksen painoja vastaa  -matriisi
-matriisi  jolloin
jolloin =(\varphi(z^l_1),\dots,\varphi(z^l_{N_l})).") Huomaa, että jos vektorit
Huomaa, että jos vektorit  ,
,  ja
ja  määriteltäisiin pystyvektoreina, niin olisi
määriteltäisiin pystyvektoreina, niin olisi ^Ta^{l-1} +b^l.")
W, ensimmäinen sarake, toinen rivi, ensimmäinen alkio: tulisiko indeksi olla 21 eikä 12?
—Pitäisi. Kiitos.
—Huomautus
Joissain lähteissä painojen  neuroni-indeksit ja ovat päinvastaisessa järjestyksessä. Tällöin vastaava matriisi
neuroni-indeksit ja ovat päinvastaisessa järjestyksessä. Tällöin vastaava matriisi  on
on  -matriisi ja
-matriisi ja ^T=W^l(a^{l-1})^T+(b^l)^T") , missä
, missä  on vektorin
on vektorin  transpoosi.
transpoosi.
2.1.1 Harjoitustehtäviä
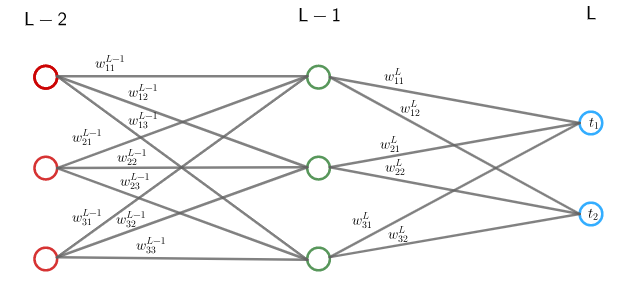
- Tarkastellaan neuroverkkoa, jonka syöte on , jossa on yksi neljän neuronin piilokerros, jonka ulostulokerroksessa on kaksi neuronia ja jonka aktivointifunktio sekä piilo- että ulostulokerroksessa on
 . (Kuvassa vain osa painoista merkitty.)
. (Kuvassa vain osa painoista merkitty.) 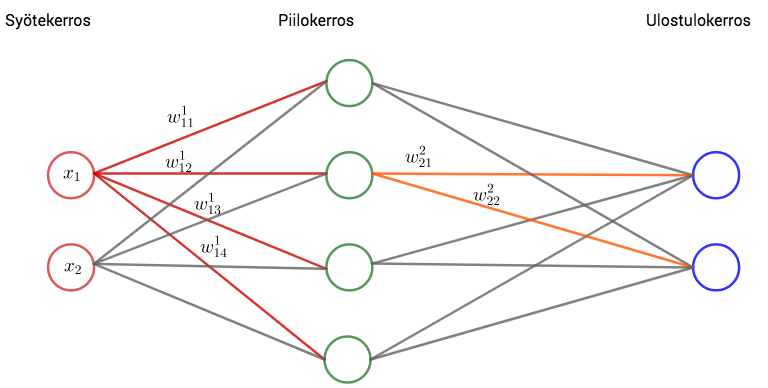
Kirjoita verkkoon liittyvät neuronien painotetut summat  ja neuronien tulokset
ja neuronien tulokset  vektoreiden ja painomatriisien avulla.
vektoreiden ja painomatriisien avulla.
2.2 Perseptroni (Perceptron)
Perseptroni on syötekerroksen ja yhden neuronin muodostama "minimaalinen neuroverkko", jonka syöte on \in\mathbb R^n") ja tulos on
ja tulos on  .
.  Perseptonia, jonka painojen muodostama vektori on
Perseptonia, jonka painojen muodostama vektori on \in\mathbb R^n") , vakiotermi on , ja aktivointifunktio on yksikköporrasfunktio (Heavisiden funktio)
, vakiotermi on , ja aktivointifunktio on yksikköporrasfunktio (Heavisiden funktio)  ,
, =
\begin{cases}
1,&\text{ jos }s>0\\
0,&\text{ jos }s\le 0,
\end{cases}") vastaa funktio
vastaa funktio  ,
, =
\begin{cases}
1,&\text{ jos }w\cdot x+b> 0\\
0,&\text{ jos }w\cdot x+b\le0,
\end{cases}") missä
missä  on vektoreiden
on vektoreiden  ja
ja  sisätulo.
sisätulo.
Kysymykseen, millaiset funktiot voidaan esittää perseptronilla, on yksinkertainen vastaus nollan ja ykkösen alkukuvien lineaarisen erotettavuuden avulla.
Joukot  ja
ja  ovat lineaarisesti erotettavat, jos on vakiot
ovat lineaarisesti erotettavat, jos on vakiot  ja
ja  , joille
, joille  ja
ja 
Tasossa  tämä tarkoittaa sitä, että joukoja
tämä tarkoittaa sitä, että joukoja  ja
ja  vastaavat pisteet voidaan erottaa suoralla ja
vastaavat pisteet voidaan erottaa suoralla ja  :ssa sitä, että pistejoukot voidaan erottaa tasolla.
:ssa sitä, että pistejoukot voidaan erottaa tasolla.
Lause
Funktio  voidaan esittää perseptronilla jos ja vain jos alkukuvat
voidaan esittää perseptronilla jos ja vain jos alkukuvat ") ja
ja ") ovat lineaarisesti erotettavat.
ovat lineaarisesti erotettavat.
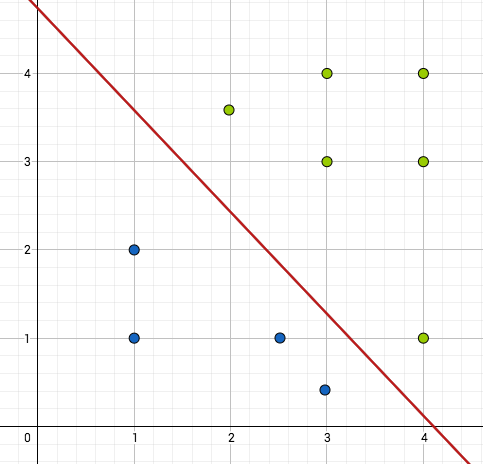
Esimerkki
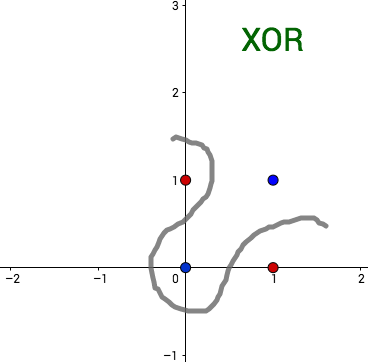
Ensimmäisen kuvan pistejoukko ei ole lineaarisesti erotettava, toisen kuvan on. Funktio, jonka arvot vihreitä palloja vastaavissa tason pisteissä on 1 ja sinisiä palloja vastaavissa pisteissä on 0, voidaan siis toisessa tapauksessa esittää perseptronilla, ensimmäisessä ei. 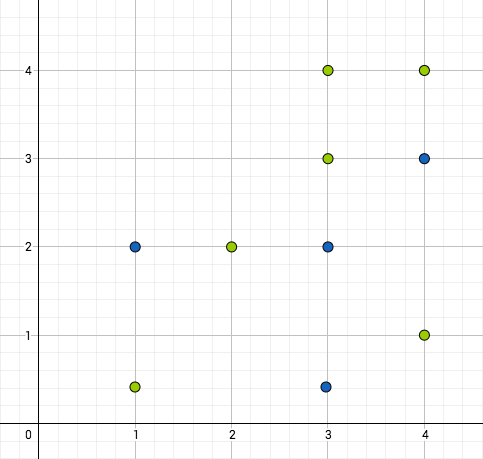
Esimerkki
Looginen konnektiivi AND (JA) voidaan esittää yhdellä perseptronilla mutta konnektiivia XOR (poissulkeva TAI) ei voi. Konnektiiveja vastaavat funktiot ovat  ja
ja 
&=AND(0,1)=AND(1,0)=0\\
AND(1,1)&=1
\end{aligned}") ja
ja &=XOR(1,1)=0\\
XOR(0,1)&=XOR(1,0)=1.
\end{aligned}") Nollan ja ykkösen alkukuvat ovat siis
Nollan ja ykkösen alkukuvat ovat siis =\{(0,0), (0,1),(1,0)\},\quad AND^{-1}(\{1\})=\{(1,1)\}") ja
ja =\{(0,0), (1,1)\},\quad XOR^{-1}(\{1\})=\{(0,1),(1,0)\}.")
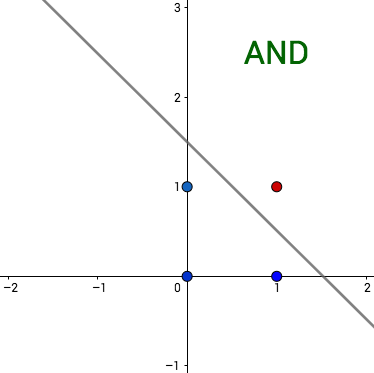
Edellisen esimerkin looginen konnektiivi AND saadaan perseptronilla 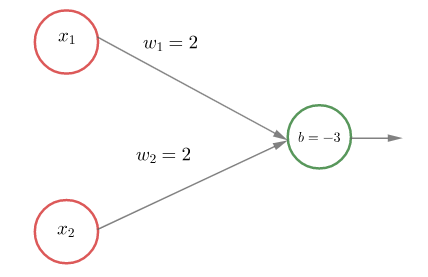 Muuttamalla painoiksi
Muuttamalla painoiksi  ja vakiotermiksi
ja vakiotermiksi  , saadaan AND-konnektiivin negaatio, NAND, jonka arvo parille
, saadaan AND-konnektiivin negaatio, NAND, jonka arvo parille ") on
on  ja muille lukupareille
ja muille lukupareille  . NAND konnektiivin esityksen olemassaolosta seuraa, että perseptronien avulla voidaan rakentaa verkko, joka tekee minkä tahansa halutun loogisen päättelyn.
. NAND konnektiivin esityksen olemassaolosta seuraa, että perseptronien avulla voidaan rakentaa verkko, joka tekee minkä tahansa halutun loogisen päättelyn.
Perseptronin ongelma on se, että pienet muutokset painoissa tai syötteissä aiheuttavat ison muutoksen tuloksessa ") . Tämä on huono asia verkon opettamisen kannalta. Perseptronin yksikköporrasfunktion sijaan käytetäänkin yleensä verkon opettamiseen paremmin soveltuvia aktivointifunktioita.
. Tämä on huono asia verkon opettamisen kannalta. Perseptronin yksikköporrasfunktion sijaan käytetäänkin yleensä verkon opettamiseen paremmin soveltuvia aktivointifunktioita.
2.2.1 Harjoitustehtäviä
- Loogista konnektiivia OR (TAI) vastaa funktio
 ,
, =OR(0,1)=OR(1,0)=1
\quad\text{ja}\quad OR(0,0)=0.")
- Määritä alkukuvat
") ja
ja ") .
. - Voidaanko OR esittää perseptronilla? Jos voidaan, niin etsi kertoimet
 ja
ja  ja perseptronin vakiotermi .
ja perseptronin vakiotermi . 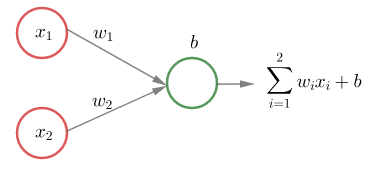
(1,1)=1 OR
—Joo. Kiitos.
—2.3 Aktivointifunktiot (Activation functions)
Neuroverkon piilo- ja ulostulokerroksissa käytetään aktivointifunktioita. Ennen neuronin tuloksen lähettämistä seuraavalle neuronille tai ulostulokerroksesta ulos, edellisen kerroksen syötteistä laskettu painotettu summa viedään aktivointifunktioon  . Aktivointifunktiot muuttavat lineaarisen (affiinin) syötteen epälineaariseksi ja niillä olisi toivottavaa olla seuraavia ominaisuuksia:
. Aktivointifunktiot muuttavat lineaarisen (affiinin) syötteen epälineaariseksi ja niillä olisi toivottavaa olla seuraavia ominaisuuksia:
epälineaarisuus: Koska summa ja yhdistetty funktio lineaarisista funktioista on lineaarinen ja affiineista affiini ja neuroneiden summalausekkeet
 ovat affiineja, niin lineaarisilla (tai affiineilla) aktivointifunktioilla saadaan affiini kuvaus.
ovat affiineja, niin lineaarisilla (tai affiineilla) aktivointifunktioilla saadaan affiini kuvaus.(jatkuvasti) derivoituvuus: Vastavirta-algoritmissa ja muissa virhefunktion minimointitavoissa tarvitaan aktivointivointifunktion derivaattaa. Jos aktivointifunktio ei ole derivoituva, niin virhefunktion minimoinnissa pitää käyttää muita kuin gradienttiin perustuvia keinoja.
identtisen funktion approksimointi: Jos aktivointifunktio on lähellä identtistä funktiota nollan lähellä, niin neuroverkko oppii tehokkaasti kun painot alustetaan satunnaisluvuilla. Muussa tapauksessa painot pitää alustaa huolellisesti.
Se, onko aktivointifunktio rajoitettu vai ei, vaikuttaa verkon oppimisnopeuteen ja oppimisen vakauteen. Rajoitetuilla aktivointifunktioilla oppiminen on yleensä vakaata ja rajoittamattomilla monesti tehokasta. Rajoittamattomia aktivointifunktioita käytettäessä kannattaa käyttää pieniä oppimisnopeuksia.
Esimerkkejä aktivointifunktioista ovat sigmoid-funktio, hyperbolinen tangentti ja ReLu-funktio.
Sigmoid-funktio (logistinen funktio)
Sigmoid-funktiolla  ,
, =\frac1{1+e^{-x}}")
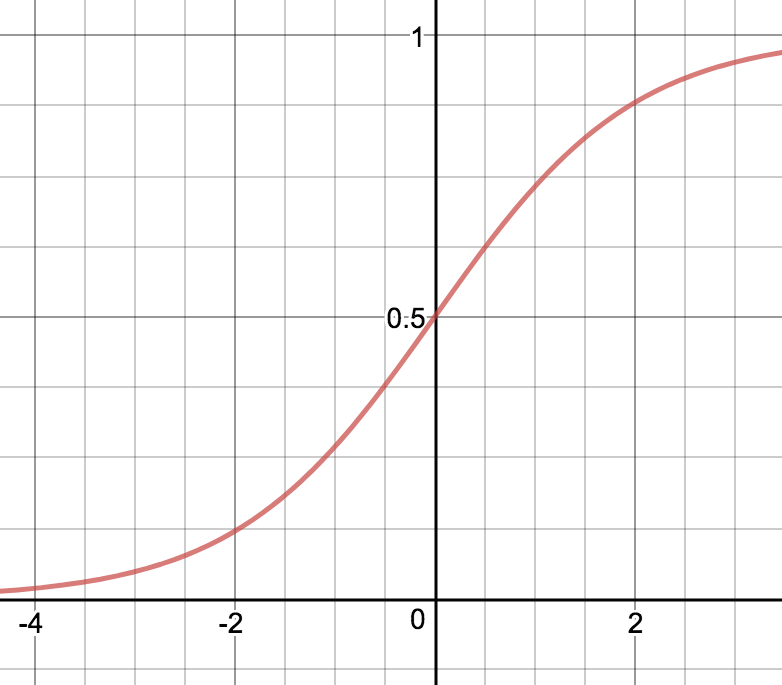
on seuraavat ominaisuudet:
rajoitettu, aidosti kasvava ja jatkuva
=0") ,
, =1")
") eli funktiolla
eli funktiolla  on kaikkien kertalukujen jatkuvat derivaatat ja
on kaikkien kertalukujen jatkuvat derivaatat ja =\frac{e^{-x}}{(1+e^{-x})^2}=\sigma(x)(1-\sigma(x)).")
Sigmoid-funktio on (binäärisen) porrasfunktion (Heaviside step function)  ,
, =0") kun
kun  ,
, =1") kun
kun  , silotettu versio. Sigmoid-funktion huono ominaisuus on se, että se kasvaa hyvin hitaasti kun kasvaa ja vähenee hyvin hitaasti kun vähenee. Sen derivaatta on hyvin lähellä nollaa kun on suuri tai pieni. Tästä seuraa ongelmia kun verkkoa opetetaan derivaattoihin perustuvilla menetelmillä. Vastavirta-algoritmia käsittelevässä luvussa nähdään, että virhefunktion osittaisderivaatat neuronin painojen ja vakiotermien suhteen riippuvat aktivointifunktion derivaatasta ja että painojen ja vakioiden muutoksen koulutettaessa ovat pieniä jos osittaisderivaatat ovat pieniä. Tällöin verkko oppii hitaasti. Toinen sigmoid-funktion huono puoli on se, että se ei ole symmetrinen nollan suhteen. Nykyisin sitä käytetään lähinnä ulostulokerroksessa varsinkin jos verkon tulokset ovat välillä
, silotettu versio. Sigmoid-funktion huono ominaisuus on se, että se kasvaa hyvin hitaasti kun kasvaa ja vähenee hyvin hitaasti kun vähenee. Sen derivaatta on hyvin lähellä nollaa kun on suuri tai pieni. Tästä seuraa ongelmia kun verkkoa opetetaan derivaattoihin perustuvilla menetelmillä. Vastavirta-algoritmia käsittelevässä luvussa nähdään, että virhefunktion osittaisderivaatat neuronin painojen ja vakiotermien suhteen riippuvat aktivointifunktion derivaatasta ja että painojen ja vakioiden muutoksen koulutettaessa ovat pieniä jos osittaisderivaatat ovat pieniä. Tällöin verkko oppii hitaasti. Toinen sigmoid-funktion huono puoli on se, että se ei ole symmetrinen nollan suhteen. Nykyisin sitä käytetään lähinnä ulostulokerroksessa varsinkin jos verkon tulokset ovat välillä  .
.
Hyperbolinen tangentti (tanh)
Hyperbolisella tangenttilla  ,
, =\frac{1-e^{-2x}}{1+e^{-2x}}")
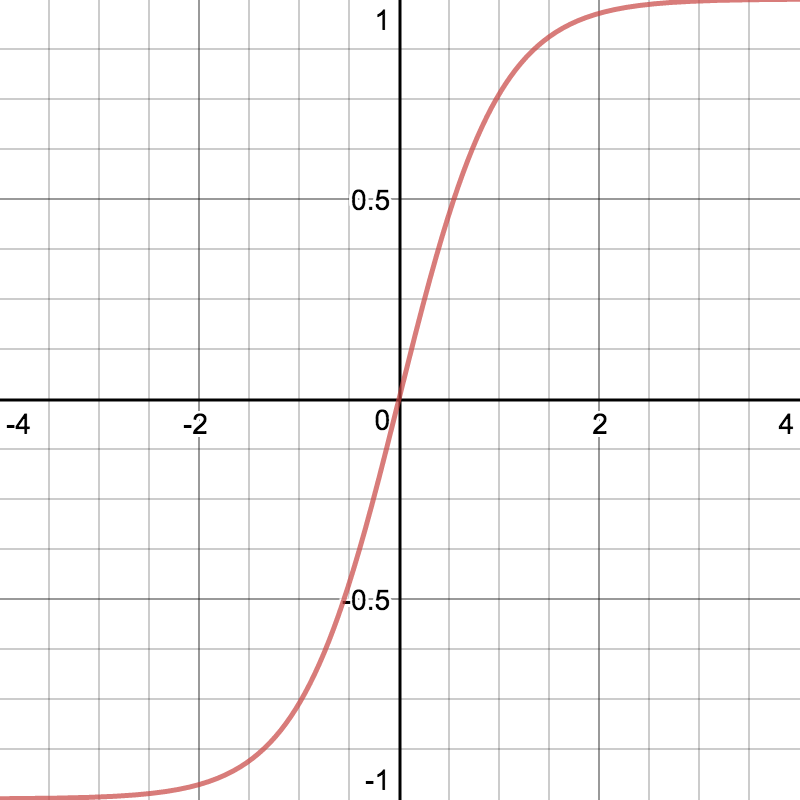 on monia samoja ominaisuuksia kuin sigmoid-funktiolla mutta se on symmetrinen nollan suhteen ja se kasvaa nopeammin nollan lähellä, jolloin sen derivaatta on suurempi. Hyperbolinen tangentti on
on monia samoja ominaisuuksia kuin sigmoid-funktiolla mutta se on symmetrinen nollan suhteen ja se kasvaa nopeammin nollan lähellä, jolloin sen derivaatta on suurempi. Hyperbolinen tangentti on
rajoitettu, aidosti kasvava ja jatkuva
=-1") ,
, =1")
") ja
ja =1-\tanh^2(x)") .
.
Gradientin pienuus isoilla ja pienillä arvoilla on myös hyperbolisen tangentin ominaisuus, joten sen käyttö aktivointifunktiona saattaa aiheuttaa verkon oppimisen hitautta.
Hyperbolinen tangentti on -listan toisessa kohdassa pitäisi varmaan puhua tanh:sta.
—Joo. Kiitos.
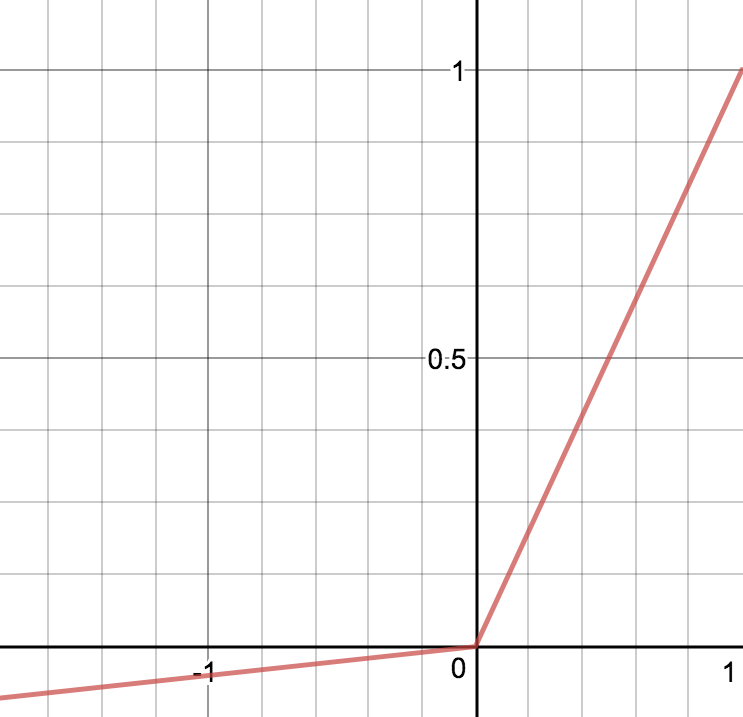
—ReLu (Rectified Linear Unit)
Neuroverkkojen piilokerroksissa paljon käytetty aktivointifunktio on ReLu-funktio  ,
, =\max\{0,x\}.")
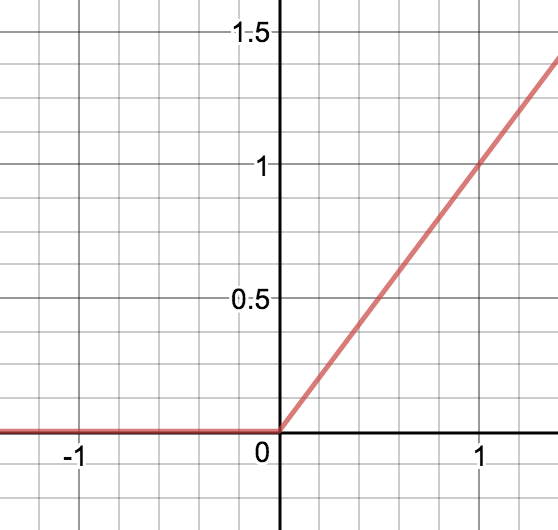
Jotta verkon toimintaan saadaan epälineaarisuutta, niin ulostulokerroksessa käytetään jotain epälineaarista aktivointifunktiota. ReLu-funktio ei ole derivoituva nollassa. Sen toinen huono ominaisuus on se, että se on nolla ja sen derivaatta on nolla negatiivisilla arvoilla. Tästä syystä joidenkin neuronien painot saattavat päivittyä oppimisen aikana nollaksi jolloin neuronit kuolevat. Neuronien kuoleentumisongelmaa pyritään välttämään muuttamalla aktivointifunktiota hieman. Yksi ReLun variantti on "Leaky ReLu", , =\max\{ax,x\}\, 0<a<1.")
Toimivimpien aktivointifunktioiden valinta riippuu siitä, mitä verkolla ollaan tekemässä eli mitä funktiota sillä approksimoidaan. Jos verkkoa vastaavalla funktiolla on samoja ominaisuuksia kuin aktivointifunktiolla, niin oppiminen on nopeampaa. Esimerkiksi sigmoid-funktiota kannattaa käyttää ulostulokerroksessa jos verkkoa käytetään luokitteluun  .
.
Universaali approksimointilause
Funktionaalianalyysin keinoin voidaan todistaa neuroverkkojen universaali approksimointilause, joka sanoo, että jos aktivointifunktio on rajoitettu, kasvava ja jatkuva, niin mille tahansa  :n kompaktin joukon jatkuvalle funktiolle on tätä aktivointifunktiota käyttävä neuroverkko, joka approksimoi haluttua funktiota hyvin. (Joukko on kompakti, jos se on suljettu ja rajoitettu.)
:n kompaktin joukon jatkuvalle funktiolle on tätä aktivointifunktiota käyttävä neuroverkko, joka approksimoi haluttua funktiota hyvin. (Joukko on kompakti, jos se on suljettu ja rajoitettu.)
Lause
Olkoon rajoitettu, kasvava ja jatkuva funktio. Olkoon  kompakti joukko. Olkoon
kompakti joukko. Olkoon  ja olkoon
ja olkoon  jatkuva funktio. Tällöin on
jatkuva funktio. Tällöin on  ,
,  , ja
, ja  ,
,  , siten, että
, siten, että -f(f)|<\varepsilon") kaikilla
kaikilla  funktiolle
funktiolle
=\sum _{i=1}^{N}v_{i}\varphi \big(w_{i}^{T}x+b_{i}\big).")
2.3.1 Harjoitustehtäviä
Näytä, että jos aktivointifunktiona käytetään affiinia funktiota
, =az+b") ,
,  , niin neuroverkkoa vastaava kuvaus on affiini. Huomaa, että riittää todeta, että affiinien kuvausten summa ja yhdistetty kuvaus ovat affiineja.
, niin neuroverkkoa vastaava kuvaus on affiini. Huomaa, että riittää todeta, että affiinien kuvausten summa ja yhdistetty kuvaus ovat affiineja.Laske sigmoid-funktion ja hyperbolisen tangentin derivaatat osamäärän derivointisäännön ja ketjusäännön avulla. Muista, että eksponenttifunktiolle
 ,
, =e^x") on
on =f(x)=e^x") kaikilla
kaikilla  . (Derivointia käsitellään luvussa Analyysia.)
. (Derivointia käsitellään luvussa Analyysia.)
2.4 Neuroverkon opettaminen
Ohjattua oppimista käytettäessä neuroverkkoa opetetaan syöte-tavoite-pareilla ") eli opetusesimerkeillä (training examples). Verkon syötteelle antamaa tulosta
eli opetusesimerkeillä (training examples). Verkon syötteelle antamaa tulosta  verrataan valitulla virhefunktiolla tavoitteeseen . Opettamisen aikana yritetään minimoida virhefunktioita ja piilokerroksen parametreja muutetaan esimerkiksi vastavirta-algoritmin avulla. Kun verkko toimii halutulla tavalla opetusesimerkeille, sen toimintaa tarkastetaan testiesimerkeillä (test examples).
verrataan valitulla virhefunktiolla tavoitteeseen . Opettamisen aikana yritetään minimoida virhefunktioita ja piilokerroksen parametreja muutetaan esimerkiksi vastavirta-algoritmin avulla. Kun verkko toimii halutulla tavalla opetusesimerkeille, sen toimintaa tarkastetaan testiesimerkeillä (test examples).
2.4.1 Vastavirta-algoritmi (backpropagation)
Eteenpäin kytketyssä neuroverkossa syötekerroksen syötteen komponentit kerrotaan ensimmäisen piilokerroksen neuroneita vastaavilla painoilla, jokaista ensimmäisen piilokerroksen neuronia vastaavat tulot lasketaan yhteen ja summaan lisätään neuronin vakiotermi (bias). Tämä summa syötetään aktivointifunktioon, joka antaa kyseisen neuronin syötteen seuraavalle kerrokselle. Tämä kerros käyttää omia painojaan, vakiotermejään ja aktivointifunktioitaan. Näin jatketaan kaikkien kerrosten läpi.
Syötteen (tai syötejoukon) antamaa tulosta verrataan tavoitteeseen ja lasketaan virhefunktion arvo. Tavoitteena on minimoida opetusesimerkkijoukkoa vastaava virhefunktio ja löytää minimointia vastaavat painot neuroneille. Monissa virhefunktion minimointikeinoissa, esimerkiksi gradienttimenetelmässä (gradient descent), tarvitaan virhefunktion  osittaisderivaatat
osittaisderivaatat  ja
ja  verkon kaikkien painojen ja vakiotermien suhteen. Osittaisderivaatat ja jokaisen neuronin vaikutus virheeseen lasketaan usein vastavirta-algoritmilla (backpropagation). Gradienttimenetelmässä neuroneille saadaan uudet painot ja vakiotermit muuttamalla edellisiä arvoja neuronien parametrien osittaisderivaatoista koostuvan gradientin vastavektorin suuntaan (eli virhefunktion nopeimman pienenemisen suuntaan).
verkon kaikkien painojen ja vakiotermien suhteen. Osittaisderivaatat ja jokaisen neuronin vaikutus virheeseen lasketaan usein vastavirta-algoritmilla (backpropagation). Gradienttimenetelmässä neuroneille saadaan uudet painot ja vakiotermit muuttamalla edellisiä arvoja neuronien parametrien osittaisderivaatoista koostuvan gradientin vastavektorin suuntaan (eli virhefunktion nopeimman pienenemisen suuntaan).
Monesti yksittäistä syötettä vastaavan tavoitteen  ja verkon antaman tuloksen
ja verkon antaman tuloksen  virhefunktiona käytetään erotuksen euklidisen normin neliötä
virhefunktiona käytetään erotuksen euklidisen normin neliötä ^2") ja opetusesimerkkijoukon virhefunktiona keskineliösummaa (mean squared error)
ja opetusesimerkkijoukon virhefunktiona keskineliösummaa (mean squared error) -y(x)\|^2,") missä
missä  on joukon opetusesimerkkien lukumäärä.
on joukon opetusesimerkkien lukumäärä.
Seuraavaksi lasketaan virhefunktion osittaisderivaatat ja verkon kaikkien painojen ja vakiotermien suhteen vastavirta-algoritmilla. Derivaatan ja osittaisderivaattojen määritelmät esimerkkeineen ja lukuvinkkeineen löytyvät luvusta Analyysia.
Virhefunktion osittaisderivaatat ulostulokerroksen parametrien suhteen
Ulostulokerroksen parametreihin liittyvät osittaisderivaatat on helppo laskea. Aloitetaan esimerkillä.
Esimerkki
Ulostulokerroksessa ( . kerros) on kaksi ja viimeisessä piilokerroksessa (
. kerros) on kaksi ja viimeisessä piilokerroksessa (.") kerros) kolme neuronia. Virhefunktio on
kerros) kolme neuronia. Virhefunktio on ^2+(t_2-y_2)^2\Big)") ja ulostulokerroksen neuronien tulokset ovat
ja ulostulokerroksen neuronien tulokset ovat ,\quad j=1,2.")
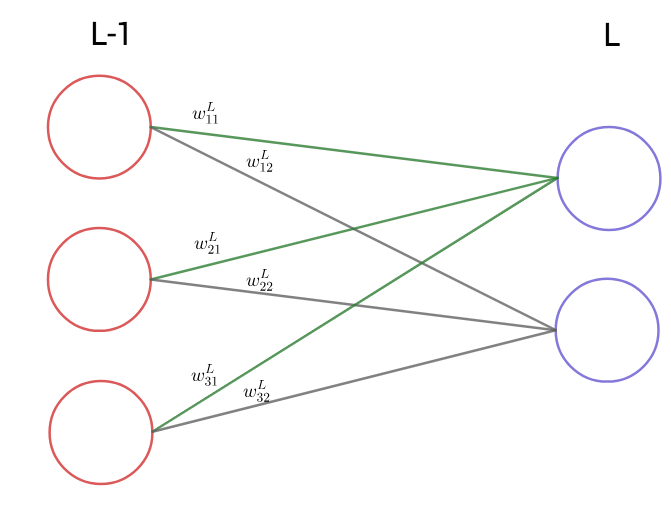
Oletetaan, että aktivointifunktio on identtinen funktio =t") ja että ulostulokerroksen vakiotermit ovat nollia. Tällöin
ja että ulostulokerroksen vakiotermit ovat nollia. Tällöin  ja
ja  .
.
Lasketaan virhefunktion osittaisderivaatat painojen  suhteen. Koska kaavan perusteella painot
suhteen. Koska kaavan perusteella painot  ,
,  ja
ja  eivät vaikuta ulostuloon
eivät vaikuta ulostuloon  , niin virhefunktion termi
, niin virhefunktion termi ^2") on vakio osittaisderivoinneissa painojen , ja suhteen. Siten derivoinnin ketjusäännön avulla nähdään, että kaikilla
on vakio osittaisderivoinneissa painojen , ja suhteen. Siten derivoinnin ketjusäännön avulla nähdään, että kaikilla  on
on ^2
=(t_1-y_1)\frac{\partial }{\partial w^L_{i1}}(t_1-y_1).") Koska summan termit, joissa on kertoimena
Koska summan termit, joissa on kertoimena  ,
,  , ovat muuttujan
, ovat muuttujan  suhteen vakiota, niin kaikilla on
suhteen vakiota, niin kaikilla on 
=\frac{\partial }{\partial w^L_{i1}}\sum_{k=1}^3w^L_{k1}a_k^{L-1}
=a_i^{L-1}") ja siten
ja siten a_i^{L-1}.") Vastaavasti saadaan, että
Vastaavasti saadaan, että ^2
=(t_2-y_2)\frac{\partial }{\partial w^L_{i2}}(t_2-y_2)") ja
ja 
=\frac{\partial }{\partial w^L_{i2}}\sum_{k=1}^3w^L_{k2}a_k^{L-1}
=a_i^{L-1}.")
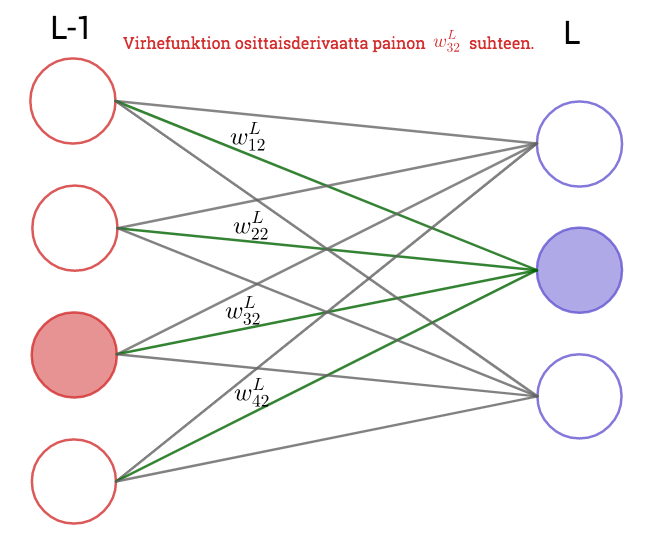
Palataan yleiseen tilanteeseen. Olkoon ulostulokerros verkon . kerros ja olkoon siinä  neuronia.
neuronia.
Osittaisderivaatat painojen suhteen
Koska virhefunktiossa termit ^2
=\Big(\varphi\Big(\sum_{i=1}^{N_{L-1}}w_{ik}^La_i^{L-1}+b_k^L\Big)-y_k\Big)^2") ovat vakioita painon suhteen kun
ovat vakioita painon suhteen kun  , niin derivoinnin ketjusääntöä käyttämällä saadaan
, niin derivoinnin ketjusääntöä käyttämällä saadaan ^2
= (t_j - y_j)\frac{\partial}{\partial w^L_{ij}}(t_j - y_j).") Huomaa, että syötteiden tulokset
Huomaa, että syötteiden tulokset  ovat vakioita kaikkien painojen suhteen ja siten niiden osittaisderivaatat ovat nollia. Siten kaikilla
ovat vakioita kaikkien painojen suhteen ja siten niiden osittaisderivaatat ovat nollia. Siten kaikilla  saadaan ketjusäännön avulla
saadaan ketjusäännön avulla 
=\frac{\partial}{\partial w^L_{ij}}t_j
=\frac{\partial}{\partial w^L_{ij}}a^L_j
=\frac{\partial}{\partial w^L_{ij}}\varphi(z^L_j)
=\varphi'(z_j^L)\frac{\partial}{\partial w^L_{ij}}z^L_j.") Koska
Koska  ja muut termit summassa paitsi
ja muut termit summassa paitsi  ovat vakioita painon suhteen, niin
ovat vakioita painon suhteen, niin 
=\frac{\partial}{\partial w^L_{ij}}\big(w_{ij}^La_i^{L-1}\big)
=a_i^{L-1}.") Yhdistämällä nämä laskut saadaan
Yhdistämällä nämä laskut saadaan \varphi'(z_j^L)a_i^{L-1}.") Tämän kaavan indeksistä riippuvaa osaa merkitään usein
Tämän kaavan indeksistä riippuvaa osaa merkitään usein \varphi'(z_j^L).") Laskemalla huomataan, että
Laskemalla huomataan, että .") Siten on
Siten on 
Osittaisderivaatat vakiotermien  suhteen
suhteen
Ulostulokerroksen osittaisderivaatat vakiotermien suhteen saadaan laskettua samaan tapaan kuin painojen suhteen. Virhefunktiossa termit ^2=\Big(\varphi\Big(\sum_{i=1}^{N_{L-1}}w_{ik}^La_i^{L-1}+b_j^L\Big)-y_k\Big)^2") ovat vakioita termin suhteen kun , joten ketjusääntöä käyttämällä saadaan
ovat vakioita termin suhteen kun , joten ketjusääntöä käyttämällä saadaan ^2
= (t_j - y_j)\frac{\partial}{\partial b^L_{j}}(t_j - y_j)\\
&=(t_j-y_j)\frac{\partial}{\partial b^L_{j}}\varphi(z_j^L)
=(t_j-y_j)\varphi'(z_j)\frac{\partial}{\partial b^L_{j}}z_j^L\\
&=(t_j-y_j)\varphi'(z_j),
\end{aligned}") sillä viimeisessä osittaisderivoinnissa ainoastaan summan termi vaikuttaa derivointiin ja sen osittaisderivaatta :n suhteen on . Siten saadaan
sillä viimeisessä osittaisderivoinnissa ainoastaan summan termi vaikuttaa derivointiin ja sen osittaisderivaatta :n suhteen on . Siten saadaan \varphi'(z_j)=\delta_j^L.")
Huomautus
Ulostulokerroksen . neuroniin liittyvää virhettä  , ketjusääntöä ja
, ketjusääntöä ja  :n kaavaa käyttäen saadaan vastaavat kaavat myös muille virhefunktioille, joita merkitään tässä myös :llä,
:n kaavaa käyttäen saadaan vastaavat kaavat myös muille virhefunktioille, joita merkitään tässä myös :llä, 
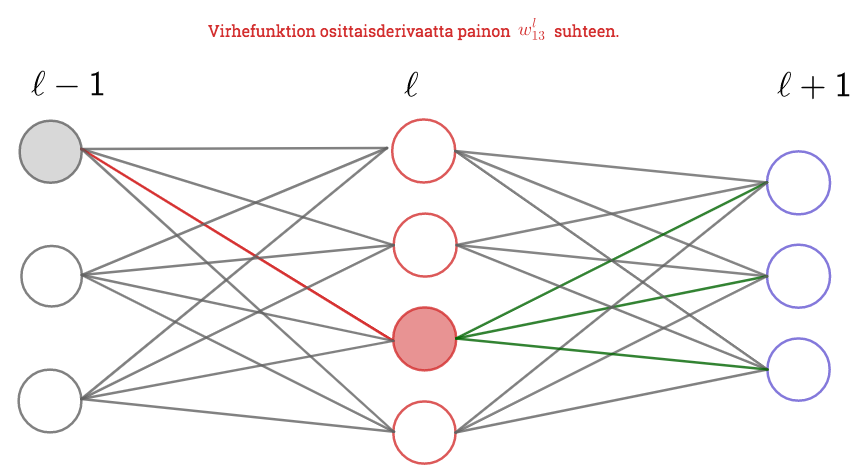
Seuraavaksi lasketaan virhefunktion osittaisderivaatat piilokerroksien painojen ja vakiotermien suhteen. Laskun avulla nähdään, että osittaisderivaatat kerroksen suhteen saadaan laskettua rekursiivisesti kun tiedetään yhtä ylemmän kerroksen osittaisderivaatat. Osittaisderivaattoja laskettaessa lähdetään siis liikkeelle ulostulokerroksen osittaisderivaatoista ja niitä käytetään ensimmäisen piilokerroksen derivaattojen laskemiseen. Osittaisderivaatat viimeisen piilokerroksen painojen ja vakioiden suhteen antavat vastaavat osittaisderivaatat viimeistä edelliselle piilokerrokselle. Näin jatketaan kunnes virhefunktion kaikki osittaisderivaatat saadaan laskettua. Nimi vastavirta-algoritmi tulee siitä, että osittaisderivaattoja lasketaan takaperoisesti ulostuloskerroksesta syöttökerrosta kohti "vastavirtaan".
Osittaisderivaatat piilokerroksen painojen suhteen
Lasketaan virhefuntion osittaisderivaatat piilokerroksen painojen suhteen Huomatuksen tyylillä. Lasku on teknisesti hieman haastavampi sillä paino, jonka suhteen osittaisderivoidaan, vaikuttaa virheeseen yhden tai useamman piilokerroksen kautta. Siksi laskussa tarvitaan tavallisen ketjusäännön lisäksi osittaisderivaattojen ketjusääntöä. Käytetään tässäkin merkintää  kerroksen neuroniin liittyvälle virheelle.
kerroksen neuroniin liittyvälle virheelle.
Ketjusääntöä ja kaavaa  käyttäen saadaan
käyttäen saadaan  Osittaisderivaattojen ketjusäännön, ketjusäännön ja kaavojen
Osittaisderivaattojen ketjusäännön, ketjusäännön ja kaavojen  ja
ja ") perusteella on
perusteella on 
\end{aligned}") ja siten
ja siten \sum_{k=1}^{N_{l+1}}\delta_k^{l+1}w_{jk}^{l+1}.")
Osittaisderivaatat piilokerroksen vakiokertoimien  suhteen
suhteen
Samaan tapaan kuin painojen tapauksessa saadaan  ja
ja \sum_{k=1}^{N_{l+1}}\delta_k^{l+1}w_{jk}^{l+1}.")
Huomioita osittaisderivaattojen kaavoista
Kaavasta nähdään, että jos edellisen kerroksen syöte  on pieni, niin kerroksen painoa vastaava virheen osittaisderivaatta
on pieni, niin kerroksen painoa vastaava virheen osittaisderivaatta  on pieni. Tällaiset painot muuttuvat vastavirta-algoritmin aikana vähän, monesti sanotaan, että ne oppivat hitaasti.
on pieni. Tällaiset painot muuttuvat vastavirta-algoritmin aikana vähän, monesti sanotaan, että ne oppivat hitaasti.
Kaavoista nähdään myös, että aktivointifunktion derivaatat vaikuttavat virheen osittaisderivaattoihin ja siten neuroneiden parametrien muutokseen. Jos derivaatta on hyvin pieni, niin parametrit muuttuvat vähän ja neuronit oppivat hitaasti. Tästä syystä verkon käyttötarkoitukseen sopivan virhefunktion valinta on tärkeää.
Verkon eri kerroksissa voidaan käyttää eri aktivointifunktioita. Jos näin on, niin äskeisissä laskuissa ja kaavoissa aktivointifunktioon lisätään verkon kerrosta vastaavat alaindeksit .
2.4.2 Harjoitustehtäviä
Laske virhefunktion osittaisderivaatat piilokerroksen
 painojen
painojen  suhteen samaan tapaan kuin ulostulokerroksen osittaisderivaatat. Mieti, mitkä painoista vaikuttavat ulostuloon
suhteen samaan tapaan kuin ulostulokerroksen osittaisderivaatat. Mieti, mitkä painoista vaikuttavat ulostuloon  .
. 
Koodissa on kätevää ja nopeaa käyttää vastavirta-algoritmin kaavojen vektori- ja matriisiversioita. Lue näistä esimerkiksi linkkilistan lähteestä. Lähteessä pohditaan myös sitä, miksi vastavirta-algoritmi on paljon nopeampi tapa laskea tarvittavat osittaisderivaatat kuin osittaisderivaattojen erotusosamäärien raja-arvomääritelmään pohjautuva tapa.
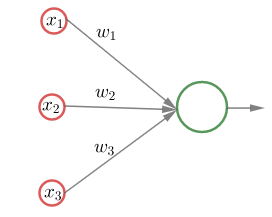
Tarkastellaan neuroverkkoa, jonka syöte on
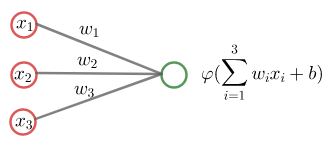
\in\mathbb R^3") , jossa ei ole piilokerroksia, jonka ulostulokerroksessa on yksi neuroni ja jonka ulostulokerroksen aktivointifunktio on derivoituva funktio . Käytetään syöte-tavoiteparin
, jossa ei ole piilokerroksia, jonka ulostulokerroksessa on yksi neuroni ja jonka ulostulokerroksen aktivointifunktio on derivoituva funktio . Käytetään syöte-tavoiteparin  ja verkon antaman tuloksen
ja verkon antaman tuloksen ") vertailuun virhefunktiota
vertailuun virhefunktiota ^2
=\frac12\Big(\varphi\big(\sum_{i=1}^3x_iw_i+b\big)-y\Big)^2.") Laske virhefunktion osittaisderivaatat painojen , ja
Laske virhefunktion osittaisderivaatat painojen , ja  suhteen.
suhteen. 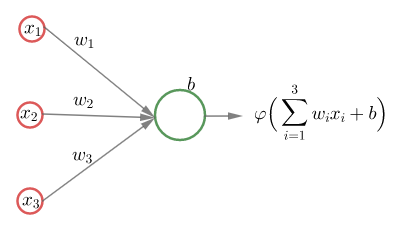
Lisätietoa vastavirta-algoritmista
Vastavirta-algoritmista löytyy paljon monentasoista luettavaa, esimerkkejä ja koodia. Osassa selitetään matemaattinen tausta ja painojen muutoksen vaikutus verkon toimintaan hyvin, osan selitys on turhan monimutkaista. Kaavoissa indeksien käyttö on monesti epämatemaattista (osittaisderivaatan indeksit ja summausindeksit samoja).
2.4.3 Gradienttimenetelmä (gradient descent)
Tavoitteena on minimoida verkon parametreista riippuvaa virhefunktiota eli syötteiden ja verkon antamien tulosten välistä virhettä. Virhefunktio on monen muuttujan (kaikkien neuronien painojen ja vakiotermien) funktio, jolle etsitään pienintä arvoa.
Matemaattisen analyysin keinoin monen muuttujan funktion ääriarvoja etsitään riittävän siistille funktiolle gradientin nollakohdista ja niistä pisteistä, joissa funktiolla ei ole osittaisderivaattaa.
Gradientin nollakohtien etsimisen sijaan virhefunktion minimoinnissa käytetään erilaisia algoritmeja kuten gradienttimenetelmää. Siinä minimin etsiminen aloitetaan laskemalla tarkasteltavan funktion arvo aloitusparametreilla. Funktion gradientti kertoo nopeimman kasvun ja siten gradientin vastavektori nopeimman vähenemisen suunnan. Sopivilla askelilla nopeimman vähenemisen suuntaan siirtymällä löydetään (menetelmään sopiville funktioille) lokaali minimi.
Minimin etsimistä gradienttimenetelmällä havainnollistetaan usein yhden tai kahden muuttujan funktiolla. Kahden muuttujan tilanteessa funktion kuvaajan voi ajatella kumpuilevaksi maastoksi, missä rinteellä seisova ihminen haluaa mennä laakson pohjalle jyrkkyydestä välittämättä. Gradienttimenetelmän keinolla alas mennään vähän matkaa jyrkintä rinnettä (gradientin vastavektorin suuntaan), pysähdytään ja valitaan taas jyrkin suunta. Näin jatketaan, kunnes päästään laakson pohjalle. Huomaa, että jos maastossa on useita laaksoja, niin liian pitkä siirtymä yhteen suuntaan voi johtaa väärän laakson pohjalle.
Verkon opettamisen vaiheet
Vastavirta-algoritmia ja gradienttimenetelmää käytettäessä suoritetaan seuraavat tehtävät:
Syötetään opetusesimerkkijoukon
kaikki opetusesimerkit verkolle.Kaikille opetusesimerkeille
 :
:
Lasketaan vastavirta-algoritmissa tarvittavat neuronikohtaiset summat
 ja ulostulot
ja ulostulot  .
.Lasketaan syötettä vastaavan virhefunktion osittaisderivaatat vastavirta-algoritmin avulla (ensin ulostulokerroksen painojen ja vakiotermien suhteen, sitten kerros kerrallaan alaspäin).
- Korjataan neuronien parametrit gradienttimenetelmän avulla. Matriisi- ja vektorimuodossa ilmoitettuna uudet parametrit ovat
^T
\quad\text{ja}\quad
b^l\rightsquigarrow b^l -\frac{\alpha}{N}\sum_{x\in A}\delta_x^l,") missä
missä  on verkon oppimisnopeus ja opetusesimerkkijoukon alkioiden lukumäärä.
on verkon oppimisnopeus ja opetusesimerkkijoukon alkioiden lukumäärä.
Huomaa, että jos opetusesimerkkijoukko koostuu yhdestä syötteestä, niin yksittäisten neuronien uudet painot vastavirta-algoritmin jälkeen ovat 
Gradienttimenetelmän eri versioita
(Satsi)gradienttimenetelmä (Gradient descent/ batch gradient descent/ vanilla gradient descent)
Perinteisessä gradienttimenetelmässä yksittäistä opetusesimerkkiä  vastaava virhe
vastaava virhe ") lasketaan jokaisen opetusesimerkin jälkeen ja minimoitavana virhefunktiona käytetään opetusesimerkkien virheiden summaa
lasketaan jokaisen opetusesimerkin jälkeen ja minimoitavana virhefunktiona käytetään opetusesimerkkien virheiden summaa  missä on opetusesimerkkijoukon alkioiden lukumäärä. Verkon parametrit päivitetään vasta, kun koko opetusesimerkkijoukko on käyty läpi. Jos parametrit laitetaan jonoon ja niistä muodostetaan vektori , niin päivitetyt parametrit ovat
missä on opetusesimerkkijoukon alkioiden lukumäärä. Verkon parametrit päivitetään vasta, kun koko opetusesimerkkijoukko on käyty läpi. Jos parametrit laitetaan jonoon ja niistä muodostetaan vektori , niin päivitetyt parametrit ovat ,") missä on verkon oppimisnopeus ja virhefunktion osittaisderivaatat parametrien suhteen ovat gradientissa samassa järjestyksessä kuin parametrit vektorissa .
missä on verkon oppimisnopeus ja virhefunktion osittaisderivaatat parametrien suhteen ovat gradientissa samassa järjestyksessä kuin parametrit vektorissa .
Gradienttimenetelmässä koko opetusesimerkkijoukon tiedot ovat kerralla muistissa, ja verkko saattaa oppia hitaasti isoilla opetusesimerkkijoukoilla. Päivityksiä on vähän, joten menetelmä on virheen pienenemisen suhteen vakaa mutta se saattaa supeta liian aikaisin ja huonommilla parametreilla kuin stokastinen versio. Gradienttimenetelmällä löydetään globaali minimi konvekseille virhefunktioille (harvinainen tilanne) ja lokaali minimi ei-konvekseille virhefunktioille.
Stokastinen gradienttimenetelmä
Stokastisessa gradienttimenetelmässä virhe lasketaan ja neuronien parametrit päivitetään jokaisen opetusesimerkkijoukon syötteen jälkeen. Tällä menetelmällä saadaan nopea tieto verkon oppimisesta, sillä verkko oppii koko ajan. Menetelmä on helppo ymmärtää ja toteuttaa. Tiheä päivittäminen on kuitenkin hidasta, parametrien arvot saattavat heilua paljon päivittämisen aikana ja häiriöherkkyys voi hidastaa virhefunktion lokaalin minimin löytymistä. Joissain tilanteissa heiluminen on etu tavalliseen gradienttimenetelmään verrattuna - stokastinen versio saattaa päätyä pienempään lokaaliin minimiin.
Minisatsi gradienttimenetelmä (mini batch gradient descent)
Satsigradienttimenetelmä on perinteisen ja stokastisen gradienttimenetelmän välimuoto. Siinä opetusesimerkkijoukko jaetaan osajoukkoihin, jotka syötetään verkolle, lasketaan virhefunktio ja päivitetään parametrit. Tämä vähentää parametrien heiluntaa päivityksissä ja mahdollistaa paremman ja vakaamman suppenemisen lokaaliin minimiin kuin toisilla versioilla. Menetelmässä voidaan käyttää ohjelmakirjastojen tehokkaita lineaarialgebran laskurutiineja.
Lisätietoa gradienttimenetelmästä
Types of Optimization Algorithms used in Neural Networks and Ways to Optimize Gradient Descent
Ruder: An overview of gradient descent optimization algorithms
A Gentle Introduction to Mini-Batch Gradient Descent and How to Configure Batch Size
3Blue1Brown: Gradient descent, how neural networks learn | Deep learning, chapter 2
2.4.4 Virhefunktiot
Verkon oppimisen kannalta on tärkeää, että pieni muutos neuronin painossa aiheuttaa vain pienen muutoksen ulostulossa. Vastavirta-algoritmin vaiheita tutkiessa huomataan, että jos opetusesimerkkijoukon virhe saadaan keskiarvona yksittäisten opetusesimerkkien virheistä, niin opetusesimerkkijoukon virheen osittaisderivaatat saadaan laskettua opetusesimerkkien virheiden avulla.
Vastavirta-algoritmin yhteydessä käytettiin yksittäisen syötteen tuloksen ja verkon antaman tuloksen välisenä virheenä erotuksen euklidisen normin neliötä ja opetusesimerkkijoukon virhefunktiona keskineliösummaa. Jos ulostulokerroksen arvot kuuluvat välille , niin voidaan käyttää myös logistisen regression virhefunktiota (ristientropian virhefunktio, cross-entropy cost function), \log(1-a_k^L)\Big),") missä vektorit
missä vektorit ") ovat syötteiden tavoitteita ja vektorit
ovat syötteiden tavoitteita ja vektorit ") verkon antamia tuloksia ja on opetusesimerkkijoukon koko.
verkon antamia tuloksia ja on opetusesimerkkijoukon koko.
Laskemalla nähdään, että Sigmoid-aktivointifunktiota käytettäessä tämän virhefunktion osittaisderivaatat neuroneiden painojen ja vakiotermien suhteen eivät riipu aktivointifunktion derivaatoista vaan pelkästään tavoitteiden ja tulosten erotuksista, ") ja
ja .") Siksi Sigmoid-funktion derivaatan pienuus suurilla ja pienillä arvoilla ei hidasta verkon oppimista niissä tapauksissa, joissa tavoitteet erovat paljon syötteistä.
Siksi Sigmoid-funktion derivaatan pienuus suurilla ja pienillä arvoilla ei hidasta verkon oppimista niissä tapauksissa, joissa tavoitteet erovat paljon syötteistä.
Joissain lähteissä syöte-tavoite-parin välisistä virhefunktioista käytetään nimeä tappiofunktio (loss function) ja opetusesimerkkijoukon virhefunktiosta virhefunktio/maksufunktio (cost function).
Lisätietoa virhefunktioista
2.4.5 Yli- ja alisovittaminen (Overfitting/underfitting)
Neuroverkon ja yleisemmin koneoppimisen opettaminen suoritetaan opetusesimerkkien avulla, (toiminta varmistetaan ja oppimisnopeus- ja muita hyperparametreja säädetään vahvistusesimerkkijoukon (validation data) avulla) ja testataan testiesimerkkijoukolla. Tarkoitus on, että verkko osaa yleistää oppimansa ja toimii lopulta riittävän tarkasti tuntemattomalle datalle. Joskus käy niin, että verkko tuntuu oppivan hyvin mutta sitten tulee ongelmia:
- Opettamisen edetessä virhefunktion pieneneminen hidastuu tai tarkkuus huononee.
- Verkko toimii hyvin opetusesimerkeille mutta ei (opetusesimerkkien kaltaisille) vahvistus- tai testiesimerkeille.
Tätä ilmiötä sanotaan ylisovittamiseksi (overfitting). Siinä verkko on oppinut opetusesimerkkijoukon liian hyvin ja säätänyt parametrinsa sen erityisominaisuuksien ja häiriöiden mukaan. Ylisovittaminen on yleinen ongelma suurissa tuhansien parametrien neuroverkoissa joissa opetusesimerkkijoukko ei ole ole riittävän suuri suhteessa verkon kokoon.
Ylisovittamista voidaan estää seuraavilla tavoilla:
- opetusesimerkkijoukon kasvattaminen
- (verkon koon pienentäminen)
- opettamisen lopettaminen riittävän aikaisin (early stopping)
- neuroneiden osittainen poistaminen verkosta (dropout layer)
- painojen pienentämien L2- ja L1- säännöstelyllä (regularization)
Opetusesimerkkijoukon kasvattaminen
Opetusesimerkkijoukon koon kasvattaminen saattaa olla vaikeaa mutta joissain tilanteissa kokoa voi kasvattaa olemassaolevan datan avulla. Esimerkiksi uusia tunnistettavia kuvia saadaan helposti kiertojen, siirtojen ja skaalauksen avulla.
Aikainen lopettaminen
Verkon toimintaa testattaessa vahvistusesimerkkijoukolla opetusesimerkkijoukon jälkeen tarkastetaan tulosten tarkkuus jokaisen osajoukon jälkeen. Kun tarkkuus pienenee, lopetetaan.
Osittainen poistaminen
Yksi tapa pienentää ylisovittamista on neuroneiden hetkellinen poistaminen verkosta. Tässä tekniikassa osa piilokerrosten neuroneista poistetaan väliaikaisesti. Vajaaseen verkkoon syötetään opetusesimerkkejä, käytetään vastavirta-algoritmia ja päivitetään verkon parametrit. Tämän jälkeen poistetut neuronit palautetaan, poistetaan uusi neuronijoukko ja jatketaan opettamista. Menetelmässä jälkeen verkko on tavallaan keskiarvo monesta samaa tehtävää tekevästä verkosta. Koska neuroneiden lähellä olevat neuronit eivät välttämättä ole mukana jokaisella opetuskierroksella niin neuroneista tulee itsenäisempiä ja verkosta robustimpi. 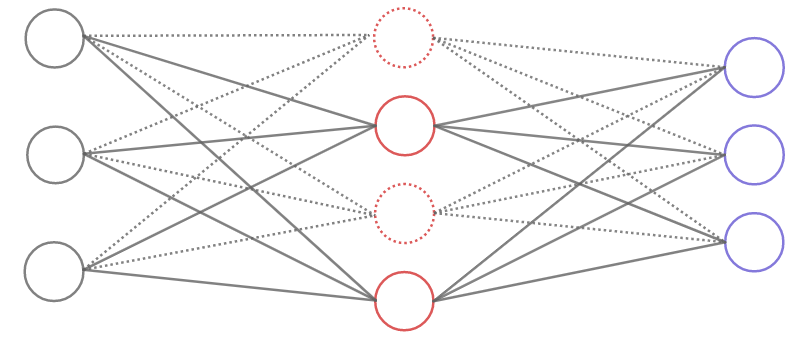
Säännöstely
Virhefunktion muuttaminen niin, että minimi löytyy pienillä painoilla perustuu siihen, että monesti verkot toimivat itseisarvoiltaan pienillä painoilla paremmin kuin suurilla. Säännöstelyssä virhefunktiota muutetaan niin, että minimi löytyy pienemmillä painoilla.
Jos verkossa on käytössä virhefunktio  , niin L2-säännöstelyn virhefunktio on
, niin L2-säännöstelyn virhefunktio on  missä on opetusesimerkkijoukon koko,
missä on opetusesimerkkijoukon koko,  ovat neuroneiden painot ja
ovat neuroneiden painot ja  on säännöstelyparametri. Neuroneiden vakiotermejä ei oteta mukaan säännöstelyosaan.
on säännöstelyparametri. Neuroneiden vakiotermejä ei oteta mukaan säännöstelyosaan.
Virhefunktion  jälkimmäinen osa on pieni kun painot ovat itseisarvoltaan pieniä. Minimoinnissa suuret painot ovat vain jos niillä saadaan alkuperäinen virhefunktio hyvin pieneksi.
jälkimmäinen osa on pieni kun painot ovat itseisarvoltaan pieniä. Minimoinnissa suuret painot ovat vain jos niillä saadaan alkuperäinen virhefunktio hyvin pieneksi.
Virhefunktion osittaisderivaatat painojen suhteen ovat  ja vakiotermien suhteen samat kuin alkuperäisellä virhefunktiolla . Siten gradienttimenetelmän antamat uudet painot saadaan kaavalla
ja vakiotermien suhteen samat kuin alkuperäisellä virhefunktiolla . Siten gradienttimenetelmän antamat uudet painot saadaan kaavalla w-\alpha\frac{\partial \mathcal E}{\partial w},") missä on verkon oppimisnopeus.
missä on verkon oppimisnopeus.
Säännöstelyssä yritetään siis samanaikaisesti käyttää mahdollisimman pieniä painoja ja saada virhefunktio pieneksi.
L1-säännöstelyssä käytetään painojen neliöiden sijaan itseisarvoja. Virhefunktio on  missä on alkuperäinen virhefunktion, on opetusesimerkkijoukon koko, ovat neuroneiden painot ja on säännöstelyparametri.
missä on alkuperäinen virhefunktion, on opetusesimerkkijoukon koko, ovat neuroneiden painot ja on säännöstelyparametri.
Virhefunktion  osittaisderivaatat painojen suhteen ovat
osittaisderivaatat painojen suhteen ovat ,") missä
missä =1") , kun
, kun  ,
, =-1") , kun
, kun  ja nolla kun paino on nolla. Vakiotermien suhteen osittaisderivaatat ovat samat kuin alkuperäisellä virhefunktiolla .
ja nolla kun paino on nolla. Vakiotermien suhteen osittaisderivaatat ovat samat kuin alkuperäisellä virhefunktiolla .
Gradienttimenetelmän antamat uudet painot saadaan kaavalla -\alpha\frac{\partial \mathcal E}{\partial w},") missä on verkon oppimisnopeus.
missä on verkon oppimisnopeus.
L1-säännöstelyssä painot pienenevät askelilla, joiden pituus ei riipu painon koosta. L2-säännöstelyssä askeleen koko on paino kerrottuna vakiolla.
Alisovittamisessa verkon parametrit päivittyvät hyvin hitaasti ja verkko oppii huonosti.
Lisätietoa yli- ja alisovittamisesta
- A. Ng: Machine Learning, The Problem of Overfitting (Coursera)
- A. Ng: Improving Deep Neural Networks: Hyperparameter tuning, Regularization and Optimization, Regularization (Coursera)
- A. Ng: Improving Deep Neural Networks: Hyperparameter tuning, Regularization and Optimization, Why regularization reduces overfitting? (Coursera)
- A. Ng: Improving Deep Neural Networks: Hyperparameter tuning, Regularization and Optimization, Dropout Regularization (Coursera)
- A. Ng: Improving Deep Neural Networks: Hyperparameter tuning, Regularization and Optimization, Understanding Dropout (Coursera)
- A. Ng: Improving Deep Neural Networks: Hyperparameter tuning, Regularization and Optimization, Other regularization methods(Coursera)
- Chatbot's Life: Regularization in deep learning
- J. D. McCaffrey: Implementing Neural Network L2 Regularization
- J. D. McCaffrey: Neural Network L2 Regularization using Python, Visual Studio Magazine 09/2017
- M. Nielsen: Neural Networks and Deep learning, Chapter 3
2.4.6 Muita virhefunktion minimointikeinoja
Vastavirta-algoritmi ja muut osittaisderivaattoihin (gradientteihin) perustuvat menetelmät ovat monesti hitaita. Vastavirta-algoritmin tapauksessa hitaus johtuu paljosta laskemisesta: neuronien parametrien muutoksessa tarvittavia osittaisderivaattoja lasketaan koko ajan iteratiivisesti. Vastavirta-algoritmin erilaisilla muunnoksilla ja muilla verkon opetusmenetelmillä haetaan lisää nopeutta. Osassa menetelmiä käytettään ensimmäisen kertaluvun osittaisderivaattojen lisäksi toisen kertaluvun derivaattoja, joiden avulla saadaan tietoa ensimmäisen kertaluvun osittaisderivaattojen kasvusta.
3. Matematiikkaa
3.1 Analyysia
Tässä luvussa käydään läpi koneoppimisessa käytettävien menetelmien taustalla olevaa matemaattista analyysia ilman perinteistä määritelmä, lause, todistus-rakennetta. Aiheesta löytyy lisätietoa, esimerkkejä ja tehtäviä lukemattomista Calculus-nimisistä kirjoista.
Neuroverkkoja käsiteltäessä tarvitaan perustietoja funktioista ja niiden ominaisuuksista. Gradientteihin perustuvissa verkon opetusmenetelmissä kuten vastavirta-algoritmissa tarvitaan esimerkiksi monen muuttujan funktioiden osittaisderivaattoja laskusääntöineen ja jonkin verran ääriarvoteoriaa.
3.1.1 Funktio
Olkoot ja joukkoja. Funktio eli kuvaus joukosta joukkoon on sääntö, joka liittää jokaiseen joukon alkioon täsmälleen yhden joukon alkion ") .
.
Joukkoa sanotaan funktion  lähtöjoukoksi (domain) ja joukkoa maalijoukoksi (target set). Tällaista funktiota merkitään
lähtöjoukoksi (domain) ja joukkoa maalijoukoksi (target set). Tällaista funktiota merkitään  Alkiota sanotaan alkion kuvaksi tai funktion arvoksi pisteessä . Joukko
Alkiota sanotaan alkion kuvaksi tai funktion arvoksi pisteessä . Joukko =\{b\in B:f(a)=b\text{ jollain }a\in A\}") on funktion arvojoukko/kuvajoukko (range).
on funktion arvojoukko/kuvajoukko (range).
Jos  , niin joukon
, niin joukon  alkukuva kuvauksessa on joukko
alkukuva kuvauksessa on joukko =\{a\in A:f(a)\in C\}.")
Joukko on -ulotteinen euklidinen avaruus. Sen alkiot ovat vektoreita , missä  kaikilla
kaikilla  .
.
Euklidisen avaruuden väli on karteesinen tulo reaaliakselin väleistä  , , missä väli
, , missä väli  voi olla muotoa
voi olla muotoa  (suljettu),
(suljettu), [") (avoin),
(avoin),  tai
tai  . Väli
. Väli  on avoin/suljettu, jos kaikki välit ovat avoimia/suljettuja. Jos
on avoin/suljettu, jos kaikki välit ovat avoimia/suljettuja. Jos  ja
ja  kaikilla , niin väli
kaikilla , niin väli  on .
on .
Pisteiden ja välistä etäisyyttä mitataan euklidisesta normista ^{1/2}") saatavalla metriikalla
saatavalla metriikalla =\|x-y\|=\Big(\sum_{i=1}^n(x_i-y_i)^2\Big)^{1/2}.")
Tällä kurssilla käsitellään funktioita  , missä
, missä  on väli.
on väli.
Funktion  kuvaaja eli graafi on joukko
kuvaaja eli graafi on joukko \in\mathbb R^{n+1}:y=f(x)\}") ja reaalilukujen
ja reaalilukujen  alkukuvat
alkukuvat =\{x\in\mathbb R^n:f(x)=c\}") ovat funktion tasa-arvojoukkoja, joita tapauksessa
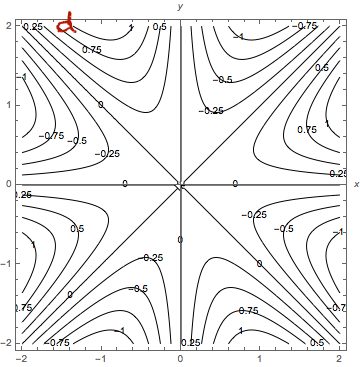
ovat funktion tasa-arvojoukkoja, joita tapauksessa  kutsutaan myös tasa-arvokäyriksi. Tasa-arvokäyriä käytetään funktion graafien piirtämiseen ja funktion kasvuvauhdin ja -suunnan tutkimiseen gradientin avulla. Topografisen kartan korkeuskäyrät ovat korkeusfunktion tasa-arvokäyriä. Tasa-arvokäyriä määritettäessä voi ensin piirtää käyrät
kutsutaan myös tasa-arvokäyriksi. Tasa-arvokäyriä käytetään funktion graafien piirtämiseen ja funktion kasvuvauhdin ja -suunnan tutkimiseen gradientin avulla. Topografisen kartan korkeuskäyrät ovat korkeusfunktion tasa-arvokäyriä. Tasa-arvokäyriä määritettäessä voi ensin piirtää käyrät =c") kolmiulotteiseen tasoon. Nämä käyrät saadaan tasojen
kolmiulotteiseen tasoon. Nämä käyrät saadaan tasojen  ja funktion kuvaajan leikkauksina. Vastaavat tasa-arvokäyrät saadaan käyrien projektioina
ja funktion kuvaajan leikkauksina. Vastaavat tasa-arvokäyrät saadaan käyrien projektioina  -tasoon.
-tasoon.
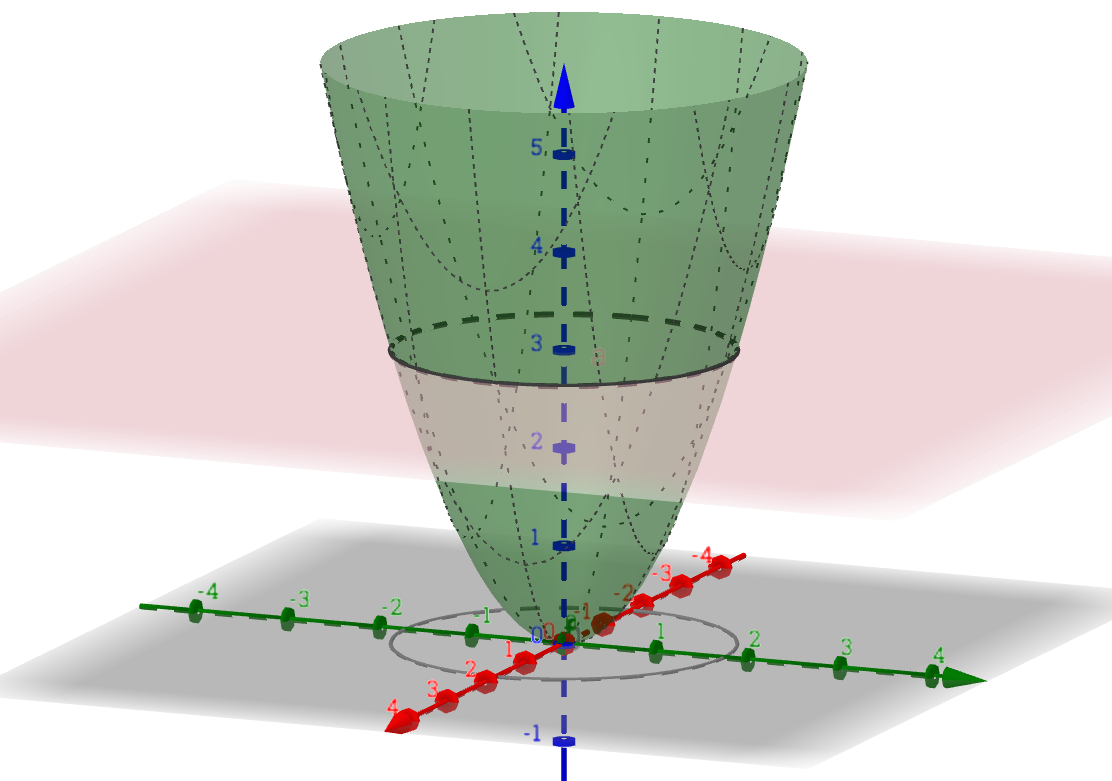
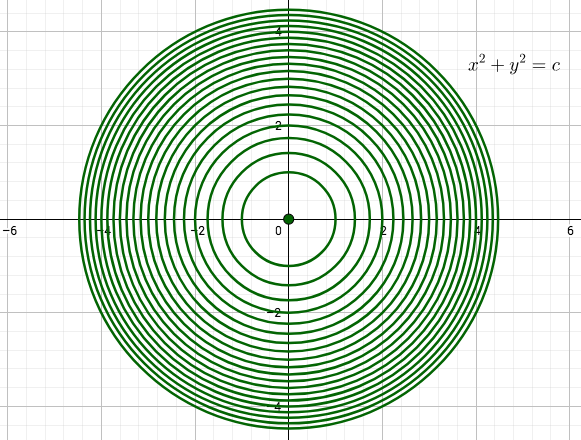
Esimerkki
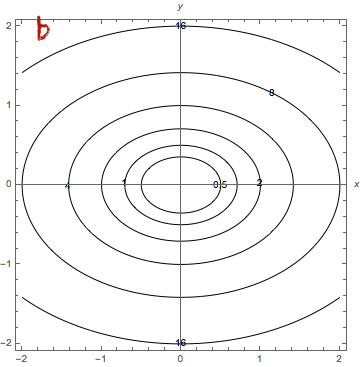
Olkoon  ,
, =x^2+y^2") . Funktion kuvaaja on ylöspäin aukeava paraboloidi, jonka huippu on origossa. Kun
. Funktion kuvaaja on ylöspäin aukeava paraboloidi, jonka huippu on origossa. Kun  , niin tasa-arvokäyrät
, niin tasa-arvokäyrät =\{(x,y)\in\mathbb R^2:x^2+y^2=c\}") ovat ympyröitä, joiden keskipiste on origo ja säde
ovat ympyröitä, joiden keskipiste on origo ja säde  . (Jos
. (Jos  , niin tasa-arvokäyrät ovat tyhjiä joukkoja sillä
, niin tasa-arvokäyrät ovat tyhjiä joukkoja sillä \ge0") kaikilla
kaikilla \in\mathbb R^2") .)
.) 
3.1.2 Harjoitustehtäviä
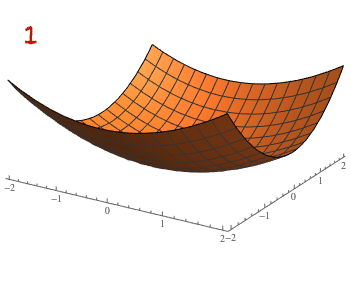
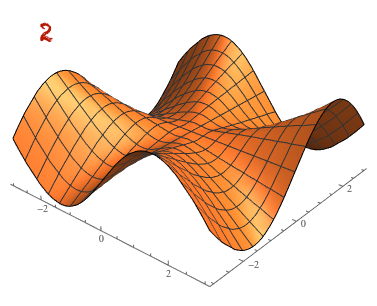
Piirrä funktion
, =x^2-y^2") kuvaaja ja tasa-arvokäyrät.
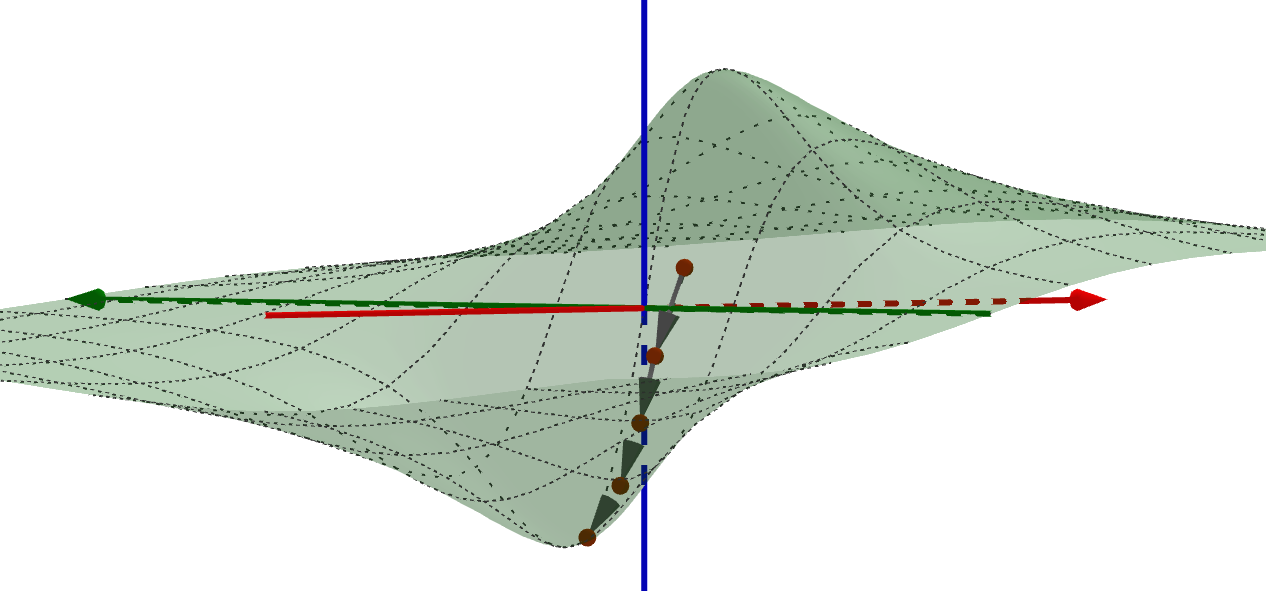
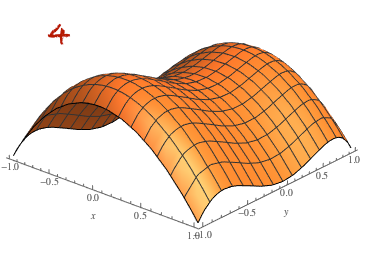
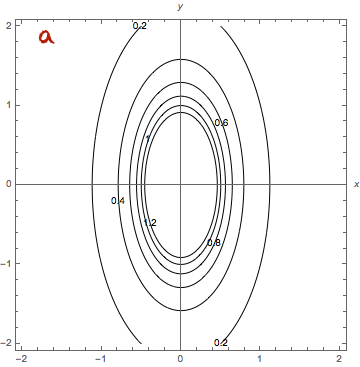
kuvaaja ja tasa-arvokäyrät.Piirrä funktion
, =(4x^2+y^2)e^{-x^2-y^2}") kuvaaja ja tasa-arvokäyrät.
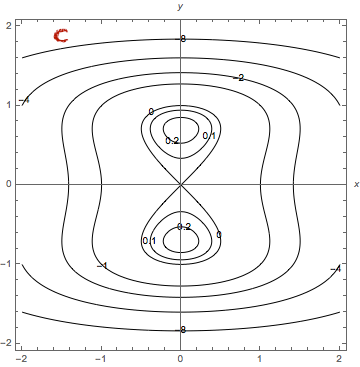
kuvaaja ja tasa-arvokäyrät.Piirrä funktion
, =xye^{-y^2}") kuvaaja ja tasa-arvokäyrät.
kuvaaja ja tasa-arvokäyrät.Yhdistä funktioiden kuvaajat ja tasa-arvokäyrät.
Affiini funktio
Neuroverkon piilo- ja ulostulokerroksen neuroneissa lasketaan edellisestä kerroksesta tulleiden syötteiden painotettu summa ja lisätään siihen vakiotermi. Jokaista neuronia vastaa siis affiini funktio, joka viedään aktivointifunktiolle.
Olkoon  -matriisi ja
-matriisi ja  . Funktio
. Funktio  ,
, =Ax+b,") missä
missä  on matriisin ja vektorin tulo, on affiini funktio.
on matriisin ja vektorin tulo, on affiini funktio.
Affiini funktio voi kääntää, skaalata ja siirtää joukkoa. Se säilyttää joitakin geometrisia ominaisuuksia sillä se kuvaa suorat suoriksi, yhdensuuntaiset suorat yhdensuuntaisiksi ja säilyttää janojen osien suhteet. Kuvaus siis kuvaa pistejoukon uudelleen kääntäen, venyttäen, siirtäen joukon paikkaa tai skaalaten joukon kokoa. Jos  , niin affiini funktio on lineaarikuvaus. Jos
, niin affiini funktio on lineaarikuvaus. Jos  , niin
, niin =b\ne0") , joten kuvaus ei ole lineaarinen. Huomaa, että monissa lähteissä affiinia funktiota sanotaan virheellisesti lineaariseksi.
, joten kuvaus ei ole lineaarinen. Huomaa, että monissa lähteissä affiinia funktiota sanotaan virheellisesti lineaariseksi.
Affiini funktio on yhdistetty funktio  lineaarikuvauksesta
lineaarikuvauksesta  ,
,  ja siirrosta
ja siirrosta  ,
, =x+b") .
.
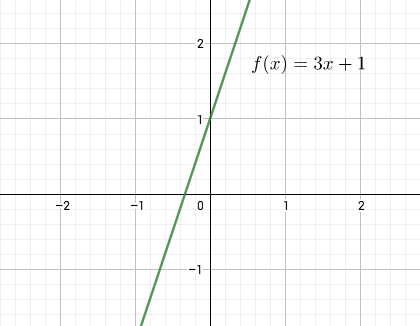
Esimerkki
Jos  , niin affiinin funktion ,
, niin affiinin funktion , =ax+b,") kuvaaja on suora, jonka kulmakerroin on ja joka leikkaa -akselin pisteessä
kuvaaja on suora, jonka kulmakerroin on ja joka leikkaa -akselin pisteessä ") .
.
Kasvava ja vähenevä funktio
Olkoon  väli ja olkoon
väli ja olkoon  funktio. Jos
funktio. Jos \le f(y)") aina kun
aina kun  , niin funktio on kasvava (increasing). Jos
, niin funktio on kasvava (increasing). Jos \ge f(y)") aina kun , niin funktio on vähenevä (decreasing).
aina kun , niin funktio on vähenevä (decreasing).
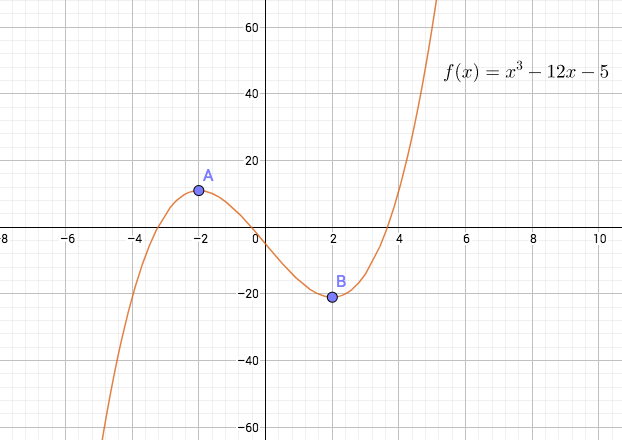
Esimerkki
Funktio , =x^3-12x-5") on kasvava väleillä
on kasvava väleillä  ja
ja  . Se on vähenevä välillä
. Se on vähenevä välillä  .
.
Yhdistetty funktio
Neuroverkkojen neuroninin syöte seuraavalle kerrokselle saatiin laskemalla painotettu summa edellisen kerroksen syötteistä, lisäämällä siihen neuronin vakiotermi ja viemällä summa aktivointifunktiolle . Tässä on kyse yhdistetystä funktiosta: aktivointifunktion arvo lasketaan summafunktion antamassa pisteessä. Yleisesti yhdistetty funktio määritellään seuraavasti.
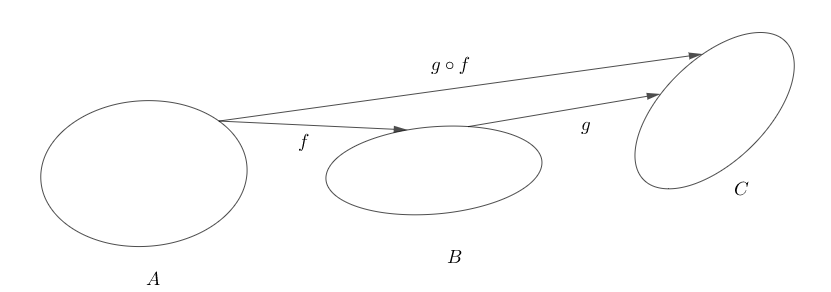
Olkoot , ja joukkoja. Olkoot  ja
ja  funktioita. Yhdistetty funktio (composite function) on funktio
funktioita. Yhdistetty funktio (composite function) on funktio  ,
, =(g\circ f)(x)=g(f(x)).")
Esimerkki
Olkoot  ,
, =3x-4") ja
ja =x^2") . Näiden funktioiden yhdistetty funktio on
. Näiden funktioiden yhdistetty funktio on  ,
, (x)=g(f(x))=g(3x-4)=(3x-4)^2=9x^2-24x-16.")
3.1.3 Derivaatta
Vastavirta-algoritmissa laskettavissa virhefunktion osittaisderivaatoissa tarvitaan aktivointifunktion derivaattaa ja derivoinnin ketjusääntöä. Verkon oppimisen tarkastelussa on hyvä olla käsitys siitä, mitä derivaatta kertoo funktiosta: lähellä nollaa oleva derivaatta kertoo, että funktion arvot muuttuvat hitaasti ja derivaatan suuri itseisarvo kertoo, että funktio muuttuu nopeasti.
Funktion derivaatta määritellään erotusosamäärien raja-arvona. Tarkastellaan, paljonko funktion arvo ") muuttuu kun pistettä siirretään vähän, pienen luvun
muuttuu kun pistettä siirretään vähän, pienen luvun  verran, joko oikealle tai vasemmalle. Muutosta tutkitaan keskimääräisenä muutoksena eli erotusosamääränä, jossa funktion arvojen erotus jaetaan siirtymällä
verran, joko oikealle tai vasemmalle. Muutosta tutkitaan keskimääräisenä muutoksena eli erotusosamääränä, jossa funktion arvojen erotus jaetaan siirtymällä  ,
, -f(x)}{h}.")
Geometrisesti tulkittuna erotusosamäärä kertoo pisteiden )") ja
ja )") kautta kulkevan suoran eli näiden pisteiden kautta kulkevan sekantin kulmakertoimen.
kautta kulkevan suoran eli näiden pisteiden kautta kulkevan sekantin kulmakertoimen. 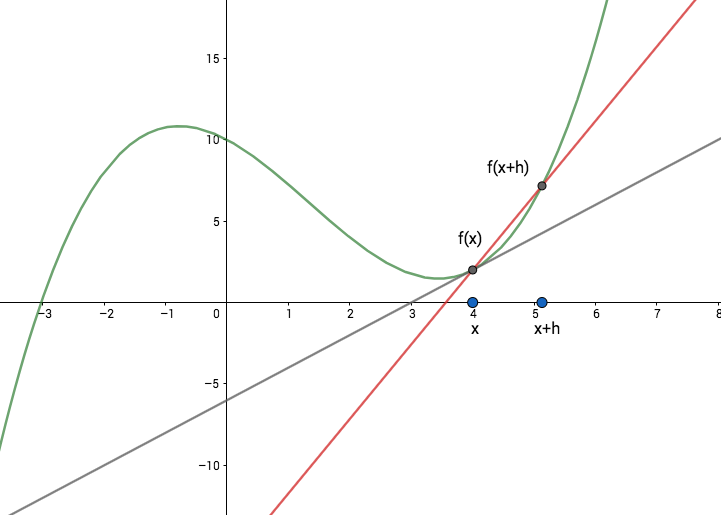
Jos tällä erotusosamäärällä on äärellinen raja-arvo kun muutos lähestyy nollaa, niin kyseinen raja-arvo on funktion derivaatta (derivative) ") pisteessä ,
pisteessä ,
=\lim_{h\to0}\frac{f(x+h)-f(x)}{h}\in\mathbb R") ja sanotaan, että on derivoituva (differentiable) pisteessä . Funktio on derivoituva, jos se on derivoituva jokaisessa pisteessä.
ja sanotaan, että on derivoituva (differentiable) pisteessä . Funktio on derivoituva, jos se on derivoituva jokaisessa pisteessä.
Huomautus
Erotusosamäärässä siirtymä
voi olla myös negatiivinen.Edellä määriteltiin derivaatta koko reaaliakselilla määritellyille funktioille. Jos
on määritelty avoimella välillä  , niin erotusosamäärää tutkittaessa otetaan mukaan pisteet
, niin erotusosamäärää tutkittaessa otetaan mukaan pisteet  ja ne siirtymät, joille
ja ne siirtymät, joille  .
.Funktion
derivaatalle käytetään monesti derivointimuuttujan sisältävää merkintää ") tai
tai ") . Leibniziltä peräisin olevassa merkinnässä erotusosamäärää merkitään
. Leibniziltä peräisin olevassa merkinnässä erotusosamäärää merkitään  ja derivaattaa
ja derivaattaa 
Tangenttitulkinta
Geometrisesti tulkittuna funktion derivoituvuus pisteessä  kertoo, että funktion kuvaajalle voidaan piirtää pisteeseen
kertoo, että funktion kuvaajalle voidaan piirtää pisteeseen )") yksikäsitteinen tangentti, jolla on äärellinen kulmakerroin. Derivaatan arvo
yksikäsitteinen tangentti, jolla on äärellinen kulmakerroin. Derivaatan arvo ") on tangentin kulmakerroin ja tangentin yhtälö on
on tangentin kulmakerroin ja tangentin yhtälö on (x-x_0),") missä
missä ") .
.
Pisteessa derivoituvalle funktiolle muutoksen pienentyessä erotusosamääriä vastaavien sekanttien kulmakertoimien raja-arvo on siis tangentin kulmakerroin ja sekantit lähestyvät tangenttia. Mitä suurempi kulmakerroin on, sitä jyrkempi tangentti on. Positiivisilla kulmakertoimilla suora on nouseva ja negatiivisilla laskeva.
Tangenttitulkinnalla on helppo huomata, että pisteessä epäjatkuva funktio ei ole derivoituva. Sen kuvaajalle ei voi piirtää tangenttia epäjatkuvuuskohdassa. Jos tangentti on pystysuora, sillä ei ole äärellistä kulmakerrointa, eikä funktio ole derivoituva kyseisessä pisteessä.
Esimerkki
Tarkastellaan itseisarvofunktiota , =|x|") . Tangenttitulkinnan avulla voidaan päätellä, että ei ole derivoituva pisteessä
. Tangenttitulkinnan avulla voidaan päätellä, että ei ole derivoituva pisteessä  . Itseisarvofunktion kuvaajalla ei ole pisteessä
. Itseisarvofunktion kuvaajalla ei ole pisteessä )=(0,0)") yksikäisytteistä tangenttia vaan niitä on äärettömän monta. (Samaan tapaan voi päätellä, että funktio, jonka kuvaajassa on kärki, ei ole derivoituva kärkeä vastaavassa pisteessä.)
yksikäisytteistä tangenttia vaan niitä on äärettömän monta. (Samaan tapaan voi päätellä, että funktio, jonka kuvaajassa on kärki, ei ole derivoituva kärkeä vastaavassa pisteessä.) 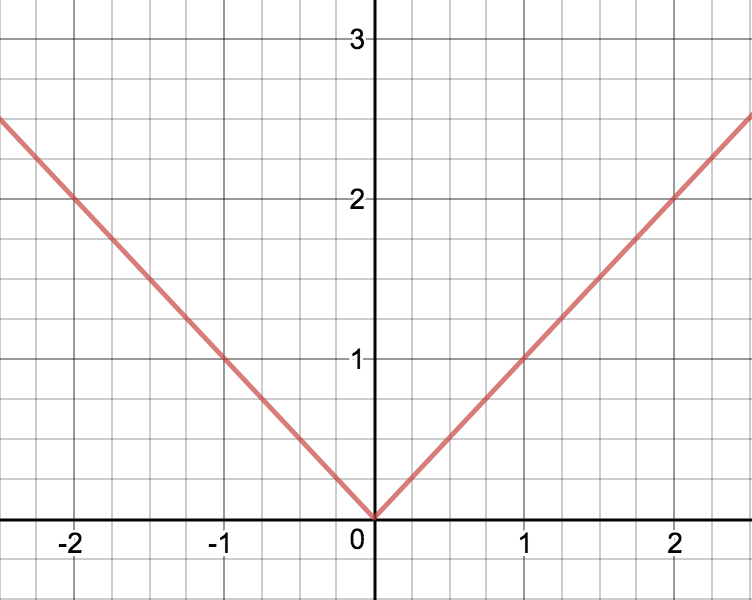
Erotusosamäärää tutkittaessa huomataan, että nollassa vasemman- ja oikeanpuoleinen raja-arvo ovat erisuuret eli raja-arvoa ei ole olemassa. Kun  , niin
, niin -f(0)}{h}=\frac{|h|}h=\frac hh=1\to1\text{ kun }h\to0") ja kun
ja kun  , niin
, niin -f(0)}{h}=\frac{|h|}h=\frac {-h}h=-1\to-1\text{ kun }h\to0.") Siten ei ole derivoituva nollassa.
Siten ei ole derivoituva nollassa.
Derivoituvien funktioiden ominaisuuksia
Derivoituvilla funktioilla on seuraavia hyviä ominaisuuksia, joita ei todisteta tässä.
Olkoot ja  derivoituvia funktioita ja .
derivoituvia funktioita ja .
Summa
 , vakiolla kerrottu funktio
, vakiolla kerrottu funktio  , tulo
, tulo  ja osamäärä
ja osamäärä  ovat derivoituvia ja
ovat derivoituvia ja '=f'+g', \quad
(cf)'=cf', \quad
(fg)'=f'g+fg',\quad
\Big(\frac fg\Big)'=\frac{f'g-fg'}{g^2},") missä osamäärän derivaatta on olemassa niissä pisteissä, joissa
missä osamäärän derivaatta on olemassa niissä pisteissä, joissa  .
.Jos
on derivoituva pisteessä , niin se on jatkuva pisteessä .
Joidenkin funktioiden derivaattoja
 , kaikilla
, kaikilla  ,
, ,
, ,
,  ja
ja  ,
, , kun
, kun  .
.
Lause (Ketjusääntö)
Olkoot ja derivoituvia funktioita. Yhdistetetty funktio  on derivoituva ja
on derivoituva ja '(x)=f'(g(x))g'(x)") kaikilla .
kaikilla .
Leibnizin derivaattamerkintä on joskus kätevä yhdistetyn funktion derivaattojen yhteydessä. Merkitään  ,
, ") ja
ja ") . Funktioiden ja derivaatat Leibnizin merkinnöin ovat
. Funktioiden ja derivaatat Leibnizin merkinnöin ovat \frac{dy}{dx}") ja
ja \frac{dz}{dy}") . Ketjusääntö tässä muodossa on
. Ketjusääntö tässä muodossa on 
Esimerkki
Olkoon , =(\sin 2x+3)^2.") Funktio on yhdistetty funktio
Funktio on yhdistetty funktio  kolmesta funktiosta
kolmesta funktiosta =2x") ,
, =\sin y+3") ja
ja =z^2") . Ketjusääntöä kahteen kertaan käyttämällä saadaan
. Ketjusääntöä kahteen kertaan käyttämällä saadaan 
&=v'(g(h(x)))(g\circ h)'(x)=v'(g(h(x)))g'(h(x))h'(x)\\
&=2(\sin 2x+3)(\cos 2x)2=4(\sin 2x+3)(\cos 2x).
\end{aligned}")
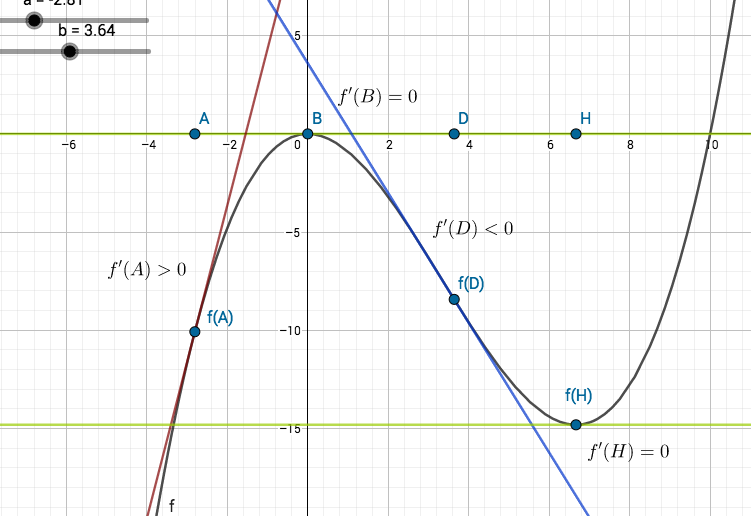
Derivaatta ja funktion käyttäytyminen
Derivaatan merkki ja suuruus kertoo paljon funktion käyttäytymisestä. Jos funktion derivaatta on positiivinen avoimella välillä, niin funktio on kasvava tällä välillä. Jos derivaatta on negatiivinen jollain avoimella välillä, niin funktio on vähenevä. Derivaatta on nolla jos tangentin kulmakerroin on nolla eli tangentti on -akselin suuntainen.
Jos funktio saavuttaa pisteessä suurimman tai pienimmän arvonsa, niin tässä pisteessä on =0") . Huomaa, että derivaatta voi olla nolla vaikka piste ei olisikaan funktion ääriarvopiste.
. Huomaa, että derivaatta voi olla nolla vaikka piste ei olisikaan funktion ääriarvopiste.
Esimerkki
Olkoon , =\frac1{10}x^3-x^2.") Funktion derivaatta on
Funktion derivaatta on =\frac3{10}x^2-2x") . Derivaatan nollakohdat ovat
. Derivaatan nollakohdat ovat  ja
ja  . Derivaatan merkkiä tutkimalla nähdään, että on kasvava väleillä
. Derivaatan merkkiä tutkimalla nähdään, että on kasvava väleillä  ja
ja  ja että se on vähenevä välillä
ja että se on vähenevä välillä  .
. 
3.1.4 Harjoitustehtäviä
Olkoot
 . Laske vakiofuntion ,
. Laske vakiofuntion , =c") kaikilla ja affinin funktion ,
kaikilla ja affinin funktion , =ax+b") kaikilla , derivaatat erotusosamäärän avulla.
kaikilla , derivaatat erotusosamäärän avulla.Todista joku derivaatan laskusääntö ominaisuuksia -kohdasta.
Reaalifunktion ääriarvoista
Funktion suurimman tai pienimmän arvon etsiminen on optimointitehtävä, jonka ratkaisemisessa hyödyllisiä työkaluja ovat derivaatta ja raja-arvot.
Olkoon väli ja olkoon funktio. Olkoon  .
.
Jos
\ge f(x)") kaikilla
kaikilla  , niin on funktion maksimipiste ja
, niin on funktion maksimipiste ja ") (globaali) maksimi eli suurin arvo.
(globaali) maksimi eli suurin arvo.Jos
\le f(x)") kaikilla , niin on funktion minimipiste ja (globaali) minimi eli pienin arvo.
kaikilla , niin on funktion minimipiste ja (globaali) minimi eli pienin arvo.
Suurinta ja pienintä arvoa kutsutaan yhteisellä nimellä globaalit ääriarvot. Globaalien ääriarvojen lisäksi voidaan tutkia funktion käyttäytymistä pisteen lähellä ja määritellä funktion lokaalit eli paikalliset ääriarvot.
Jos on
 , siten, että kaikilla
, siten, että kaikilla  , niin on funktion lokaali maksimipiste ja lokaali maksimi eli suurin arvo.
, niin on funktion lokaali maksimipiste ja lokaali maksimi eli suurin arvo.Jos on
, siten, että kaikilla , niin on funktion lokaali minimipiste ja lokaali minimi eli pienin arvo.
Huomaa, että funktiolla ei aina ole suurinta ja pienintä arvoa. Esimerkiksi funktio  ,
, =\frac1x") , on rajoittamaton ja
, on rajoittamaton ja =\infty") ja
ja =0") ja
ja >0") kaikilla
kaikilla  . Siten funktiolla ei ole suurinta eikä pienintä arvoa. Suljetulla välillä määritellyille jatkuville funktioille ääriarvot ovat aina olemassa.
. Siten funktiolla ei ole suurinta eikä pienintä arvoa. Suljetulla välillä määritellyille jatkuville funktioille ääriarvot ovat aina olemassa.
Lause (Ääriarvolause)
Olkoon  jatkuva funktio. Tällöin funktio saavuttaa välillä
jatkuva funktio. Tällöin funktio saavuttaa välillä  suurimman ja pienimmän arvonsa.
suurimman ja pienimmän arvonsa.
Funktion derivaatta, mikäli se on olemassa, on hyödyllinen työkalu ääriarvojen etsimisessä. Derivaatan määritelmän avulla on helppo näyttää, että jos funktiolla on lokaali ääriarvo pisteessä ja on derivoituva pisteessä , niin =0") . Suljetulla välillä määritellyn funktion ääriarvoja etsittäessä riittää siis selvittää funktion arvo niissä pisteissä, joissa derivaatta on nolla, niissä pisteissä, joissa derivaattaa ei ole olemassa ja välin päätepisteissä. Derivaatan nollakohtia ja pisteitä, joissa derivaattaa ei ole olemassa, sanotaan kriittisiksi pisteiksi (critical points). Muulla kuin suljetulla välillä määritellylle funktiolle pitää tutkia funktion käyttäytymistä välin päätepisteissä esimerkiksi raja-arvojen avulla.
. Suljetulla välillä määritellyn funktion ääriarvoja etsittäessä riittää siis selvittää funktion arvo niissä pisteissä, joissa derivaatta on nolla, niissä pisteissä, joissa derivaattaa ei ole olemassa ja välin päätepisteissä. Derivaatan nollakohtia ja pisteitä, joissa derivaattaa ei ole olemassa, sanotaan kriittisiksi pisteiksi (critical points). Muulla kuin suljetulla välillä määritellylle funktiolle pitää tutkia funktion käyttäytymistä välin päätepisteissä esimerkiksi raja-arvojen avulla.
Esimerkki
Edellisen esimerkin funktion =\frac1{10}x^3-x^2") derivaatan nollakohdat antavat lokaalit ääriarvot. Nollakohdista on lokaali maksimipiste ja lokaali minimipiste. Koska
derivaatan nollakohdat antavat lokaalit ääriarvot. Nollakohdista on lokaali maksimipiste ja lokaali minimipiste. Koska =\pm\infty") , niin funktiolla ei ole globaaleja ääriarvoja.
, niin funktiolla ei ole globaaleja ääriarvoja.
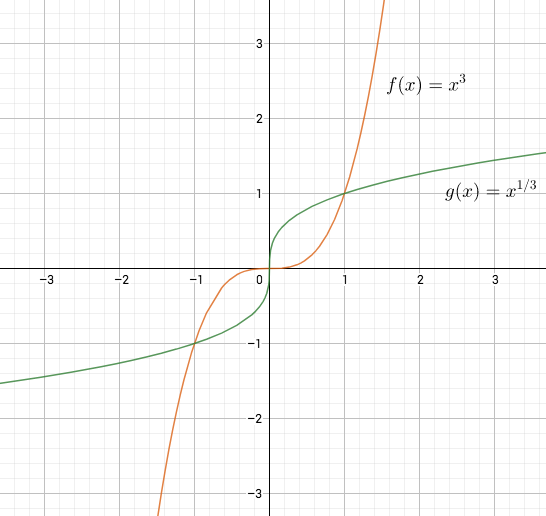
Esimerkki
Derivaatta voi olla nolla, vaikka nollakohta ei olisikaan ääriarvopiste. Funktiolle =x^3") on
on =0") ja funktio
ja funktio =x^{1/3}") ei ole derivoituva nollassa, joten
ei ole derivoituva nollassa, joten  on molempien funktioiden kriittinen piste. Se ei kuitenkaan ole ääriarvopiste sillä
on molempien funktioiden kriittinen piste. Se ei kuitenkaan ole ääriarvopiste sillä <0") ja
ja <0") kun ja ja
kun ja ja >0") kun . Funktioilla ei ole globaaleja ääriarvoja sillä
kun . Funktioilla ei ole globaaleja ääriarvoja sillä =\lim_{x\to\pm\infty}g(x)=\pm\infty") . Jos rajoitutaan suljetulle välille , niin on molempien funktioiden globaali minimipiste ja globaali maksimipiste.
. Jos rajoitutaan suljetulle välille , niin on molempien funktioiden globaali minimipiste ja globaali maksimipiste.
3.1.5 Harjoitustehtäviä
- Etsi funktion ,
=(x^2-3)e^x") ääriarvot. Etsi funktion ääriarvot välillä
ääriarvot. Etsi funktion ääriarvot välillä  .
.
Lisätietoa derivaatoista
3.1.6 Osittaisderivaatat ja gradientti
Verkkoa opetettaessa minimoidaan virhefunktiota, jonka arvo riippuu verkon parametreista eli neuronien painoista ja vakiokertoimista. Virhefunktio on siis funktio useampiulotteisesta avaruudesta reaaliluvuille,  , missä on verkon parametrien lukumäärä. Useammasta kuin yhdestä parametrista riippuvan funktion ääriarvojen etsiminen on yhden muuttujan funktion minimiointia/maksimointia haastavampi tehtävä. Lausetta vastaava ääriarvolause on totta korkeampiulotteisessakin tilanteessa: kompaktissa (suljettu ja rajoitettu) joukossa jatkuva funktio saavuttaa suurimman ja pienimmän arvonsa.
, missä on verkon parametrien lukumäärä. Useammasta kuin yhdestä parametrista riippuvan funktion ääriarvojen etsiminen on yhden muuttujan funktion minimiointia/maksimointia haastavampi tehtävä. Lausetta vastaava ääriarvolause on totta korkeampiulotteisessakin tilanteessa: kompaktissa (suljettu ja rajoitettu) joukossa jatkuva funktio saavuttaa suurimman ja pienimmän arvonsa.
Useamman muuttujan funktion osittaisderivaatta kertoo, miten funktio muuttuu yhden muuttujansa funktiona. Osittaisderivaatta saadaan pitämällä muita muuttujia vakiona ja laskemalla derivaatta tutkittavan muuttujan suhteen kuten tavallinen derivaatta kaavassa.
Osittaisderivaatta
Olkoon , olkoon  ja olkoon
ja olkoon ") . Jos erotusosamäärällä
. Jos erotusosamäärällä -f(a_1,\dots,a_n)}{h}") on äärellinen raja-arvo, niin se on funktion . osittaisderivaatta eli osittaisderivaatta muuttujan
on äärellinen raja-arvo, niin se on funktion . osittaisderivaatta eli osittaisderivaatta muuttujan  suhteen pisteessä ,
suhteen pisteessä , =\frac{\partial f}{\partial x_i}(a)
=\lim_{h\to0}\frac{f(a_1,\dots,a_i+h,\dots,a_n)-f(a_1,\dots,a_n)}{h}.")
Osittaisderivaattojen geometrinen tulkinta
Tarkastellaan osittaisderivaattojen geometrista tulkintaa kahden muuttujan funktiolle . Olkoon \in\mathbb R^2") . Pystysuoran tason
. Pystysuoran tason \in\mathbb R^3:y=y_0\}") ja funktion kuvaajan muodostaman pinnan
ja funktion kuvaajan muodostaman pinnan \in\mathbb R^3:z=f(x,y)\}") leikkaus on käyrä
leikkaus on käyrä \in\mathbb R^3:z=f(x,y_0), y=y_0\}.") Tämä käyrä on funktion
Tämä käyrä on funktion ") kuvaaja tasossa
kuvaaja tasossa  . Funktion osittaisderivaatta muuttujan suhteen pisteessä
. Funktion osittaisderivaatta muuttujan suhteen pisteessä ") on käyrän
on käyrän  tangentin kulmakerroin pisteessä
tangentin kulmakerroin pisteessä )") . Osittaisderivaatta
. Osittaisderivaatta ") antaa siis funktion arvojen muutosvauhdin muuttujan suhteen kun muuttuja pidetään vakiona.
antaa siis funktion arvojen muutosvauhdin muuttujan suhteen kun muuttuja pidetään vakiona.
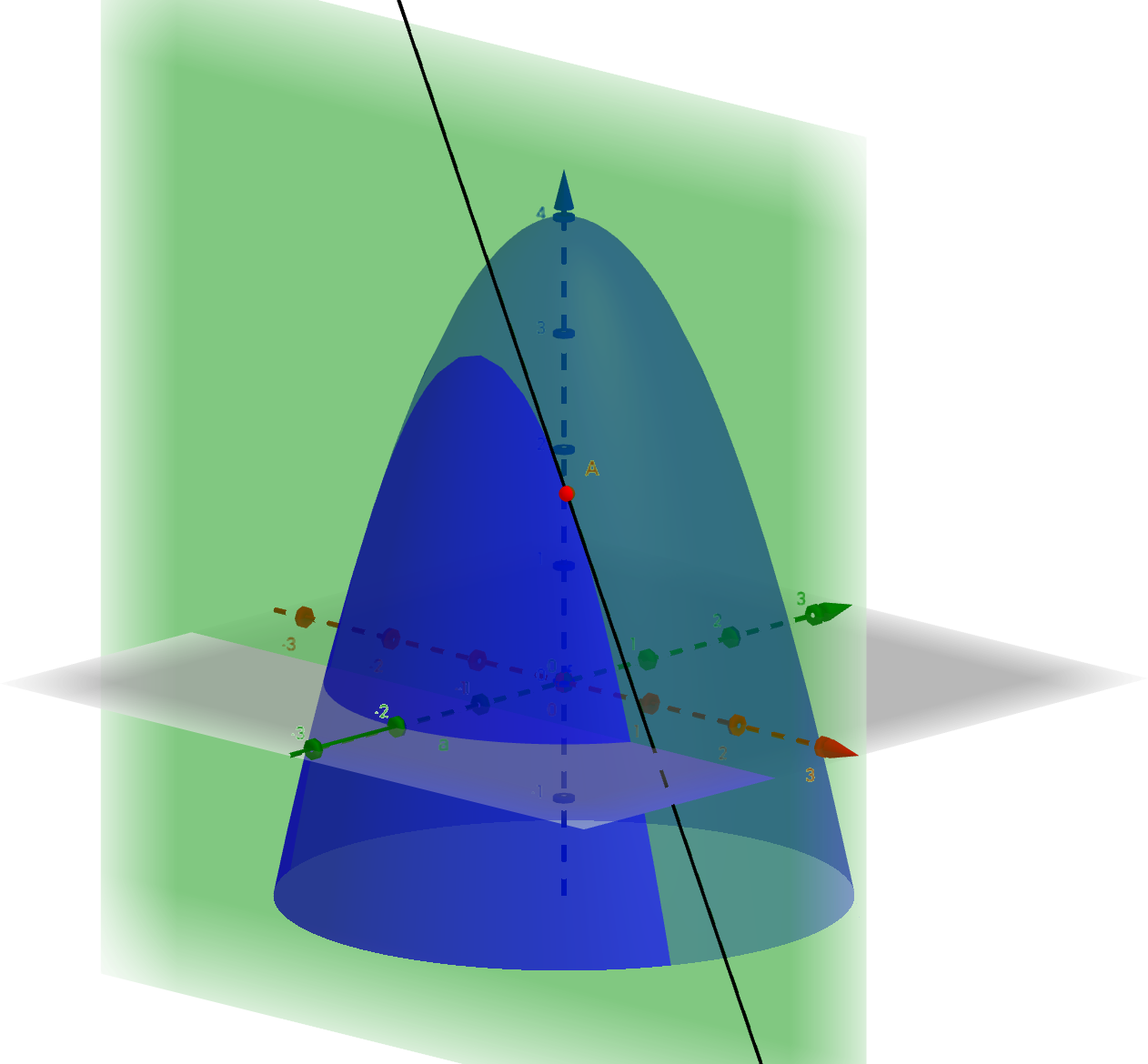
Esimerkki
Olkoon , =4-(x^2+y^2)") . Funktion osittaisderivaatat ovat
. Funktion osittaisderivaatat ovat =-2x\quad\text{ ja }\frac{\partial }{\partial y}f(x,y)=-2y.") Kuva havainnollistaa osittaisderivaattaa
Kuva havainnollistaa osittaisderivaattaa  pisteessä
pisteessä ") . Äskeisen tulkinnan taso
. Äskeisen tulkinnan taso \in\mathbb R^3:y=-1\}") ja
ja \in\mathbb R^3:z=3-x^2, y=-1\}") ja tangentin kulmakerroin pisteessä
ja tangentin kulmakerroin pisteessä ") on
on  .
. 
Yhden muuttujan funktiolle derivaatta on kuvaajan tangentin kulmakerroin. Tasossa määritellylle funktiolle osittaisderivaatat ja  ovat kuvaajan tangenttitason kaltevuuskertoimia. Olkoon . Funktion kuvaajan tangenttitaso pisteessä saadaan yhtälöstä
ovat kuvaajan tangenttitason kaltevuuskertoimia. Olkoon . Funktion kuvaajan tangenttitaso pisteessä saadaan yhtälöstä (x-x_0)
+\frac{\partial f}{\partial y}(x_0,y_0)(y-y_0)-(z-f(x_0,y_0))=0.")
Funktion kuvaajan tangenttitaso pisteessä on taso, joka sisältää kaikki ne pisteen  kautta kulkevat suorat, jotka ovat tangentteja jollekin kuvaajalla sijaitsevalle pisteen kautta kulkevalle käyrälle. Tangenttitaso sivuaa kuvaajaa pisteessä ja kaikista pisteen kautta kulkevista tasoista se on se, jolla on pisteessä samat osittaisderivaatat kuin funktiolla .
kautta kulkevat suorat, jotka ovat tangentteja jollekin kuvaajalla sijaitsevalle pisteen kautta kulkevalle käyrälle. Tangenttitaso sivuaa kuvaajaa pisteessä ja kaikista pisteen kautta kulkevista tasoista se on se, jolla on pisteessä samat osittaisderivaatat kuin funktiolla .
Esimerkki
Olkoon , =\sin x\cos y.") Etsitään funktion tangenttitaso pisteessä
Etsitään funktion tangenttitaso pisteessä ") (ja kerrataan samalla trigonometrisia funktioita). Nyt
(ja kerrataan samalla trigonometrisia funktioita). Nyt =\sin \frac \pi6\cos \frac \pi4=\frac12\frac12\sqrt2=\frac 14\sqrt 2") ,
, =\cos x\cos y\quad
\text{ ja }\quad \frac{\partial f}{\partial y}(x,y)=- \sin x \sin y,") joten
joten 
=\cos \frac \pi6 \cos \frac \pi4=\frac 12\sqrt 3\frac 12\sqrt 2=\frac 14\sqrt 6") ja
ja 
=-\sin \frac \pi6\sin\frac \pi4=-\frac12\frac12\sqrt 2=-\frac14\sqrt 2.") Siten tangenttitaso pisteessä saadaan yhtälöstä
Siten tangenttitaso pisteessä saadaan yhtälöstä -\frac14\sqrt 2(y-\frac \pi4)+\frac 14\sqrt 2.")
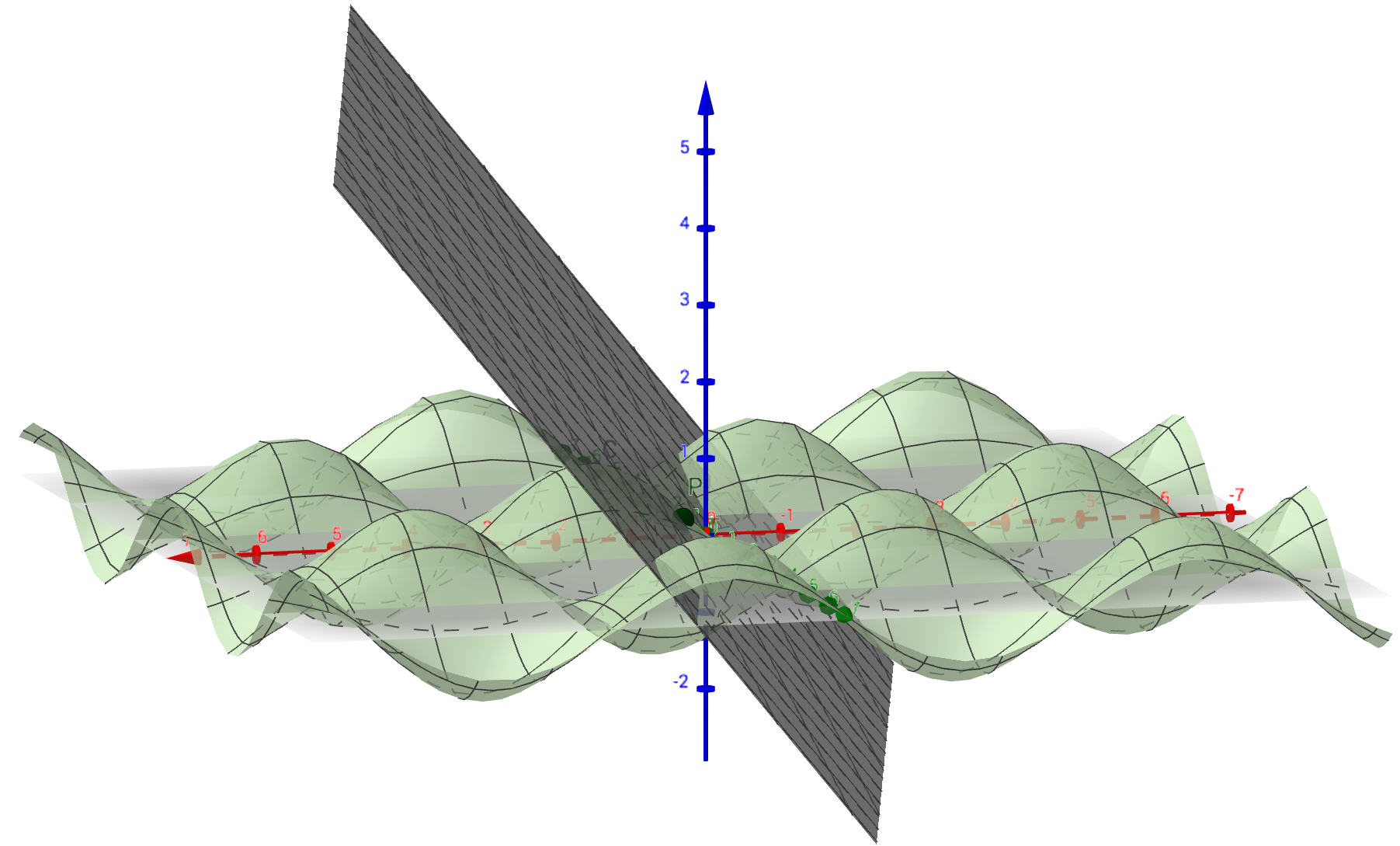
3.1.7 Harjoitustehtäviä
Olkoon
, =x^2+3xy+y-1.") Laske funktion osittaisderivaatat
Laske funktion osittaisderivaatat ") ja
ja ") pisteessä
pisteessä ") . Piirrä kuvia.
. Piirrä kuvia.Olkoon
,
=y\sin(xy).") Laske funktion osittaisderivaatat ja .
Laske funktion osittaisderivaatat ja .Olkoon
, =x\cos y-ye^x.") Määritä funktion kuvaajan tangenttitaso pisteessä
Määritä funktion kuvaajan tangenttitaso pisteessä )") .
.
Onko 3. tehtävän funktio f(x,y)=x cos (y-ye^x) vai f(x,y) = x cos (y) -ye^x ?
—siis mikä on olevinaan piste (0,0,f(0,0)) ?
—- tehtävässä ei ole sulkuja, joten jälkimmäinen vaihtoehto. f on kahden muuttujan funktio, jolle f(0,0)=0-0=0. Piste on siis (0,0,0).
Gradientti ja sen geometrinen tulkinta
Olkoon funktio, jolla on osittaisderivaatat kaikkien muuttujien , suhteen. Osittaisderivaatoista muodostettu vektori =\Big(
\frac{\partial f}{\partial x_1}(x),\frac{\partial f}{\partial x_2}(x),\dots,
\frac{\partial f}{\partial x_n}(x)\Big)") on funktion gradientti.
on funktion gradientti.
Funktion gradientti voidaan ajatella funktioksi  ,
, =\big(\frac{\partial f}{\partial x_1}(x),\frac{\partial f}{\partial x_2}(x)\big).") Tällaista funktiota voidaan havainnollistaa vektorikentällä, jossa jokaiseen tason pisteeseen piirretään vektori, jonka suunta ja pituus saadaan funktion arvosta kyseisessä pisteessä. Monesti pituus skaalataan tai ilmaistaan väreillä.
Tällaista funktiota voidaan havainnollistaa vektorikentällä, jossa jokaiseen tason pisteeseen piirretään vektori, jonka suunta ja pituus saadaan funktion arvosta kyseisessä pisteessä. Monesti pituus skaalataan tai ilmaistaan väreillä.
Esimerkki
Olkoon
 ,
, =x_1x_2") . Funktion gradientti on
. Funktion gradientti on =\Big(\frac{\partial g}{\partial x_1}(x),\frac{\partial g}{\partial x_2}(x)\Big)=(x_2,x_1).")
Olkoon
, =x_1^2+x_2^2") . Funktion gradientti on
. Funktion gradientti on =\Big(\frac{\partial f}{\partial x_1}(x),\frac{\partial f}{\partial x_2}(x)\Big)=(2x_1,2x_2).")
Funktioiden ja gradientteja voidaan havainnollistaa vektorikentillä. 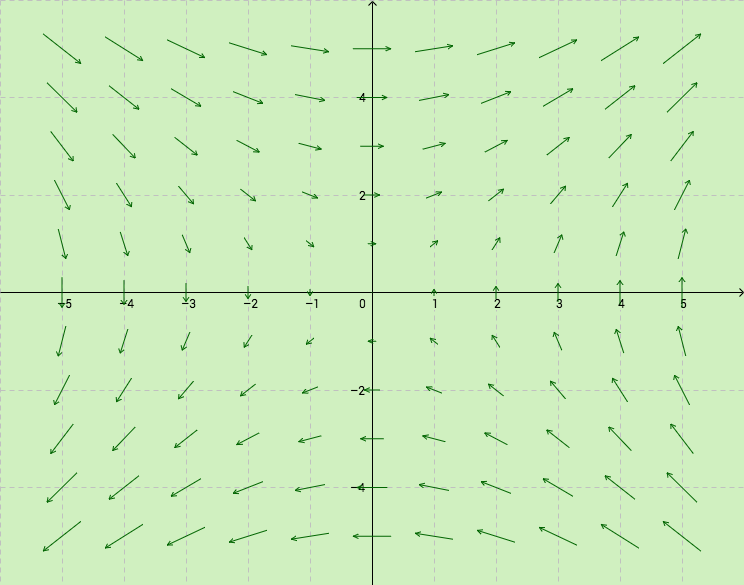
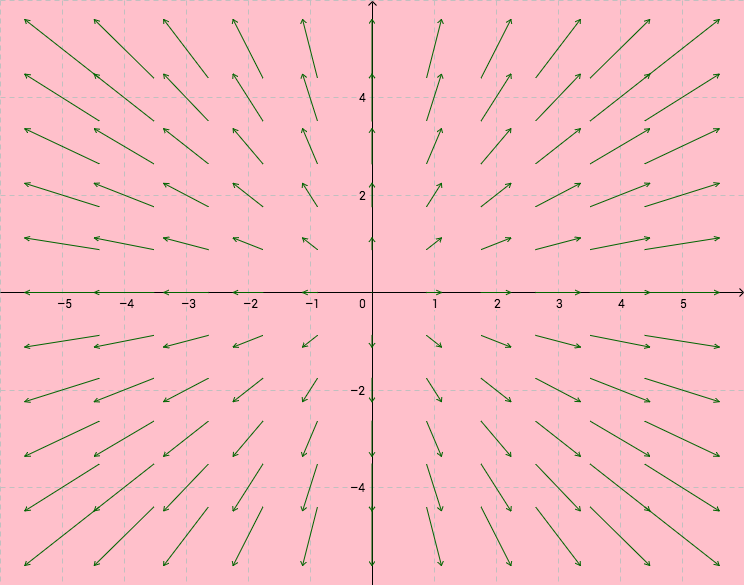
Osittaisderivaatat kertovat funktion kasvunopeuden koordinaattiakseleiden suuntiin ja funktion gradientti  pisteessä
pisteessä  kertoo suunnan, johon funktio kasvaa nopeimmin. Gradientin pituus eli vektorin
kertoo suunnan, johon funktio kasvaa nopeimmin. Gradientin pituus eli vektorin ") normi kertoo funktion kasvuvauhdin. Se, että gradientti antaa nopeimman kasvun suunnan, todistetaan suuntaisderivaattojen avulla. (Ne määritellään samaan tapaan kuin osittaisderivaatat mutta erotusosamäärässä käytetään kantavektoreiden
normi kertoo funktion kasvuvauhdin. Se, että gradientti antaa nopeimman kasvun suunnan, todistetaan suuntaisderivaattojen avulla. (Ne määritellään samaan tapaan kuin osittaisderivaatat mutta erotusosamäärässä käytetään kantavektoreiden ") sijaan vektoria
sijaan vektoria  , jonka suuntaan funktion kasvunopeus halutaan määrittää.)
, jonka suuntaan funktion kasvunopeus halutaan määrittää.)
Gradientin geometrisessa tulkinnassa käytetään vektorikentän lisäksi apuna tasa-arvokäyriä.
Esimerkki
Esimerkistä tutun funktion , tasa-arvokäyrät ja gradienttien =(x_2,x_1)") vektorikenttä piirrettynä samaan kuvaan.
vektorikenttä piirrettynä samaan kuvaan. 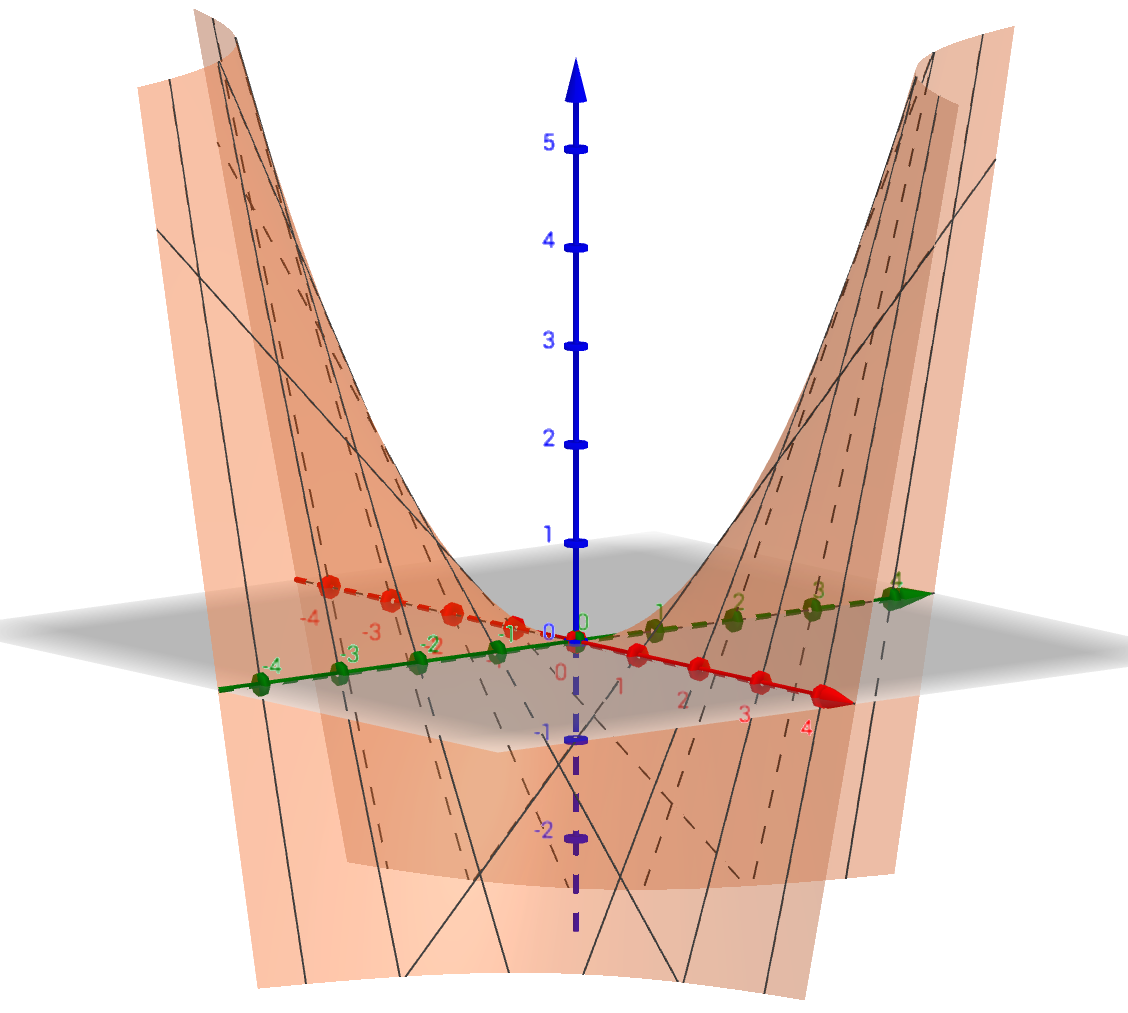
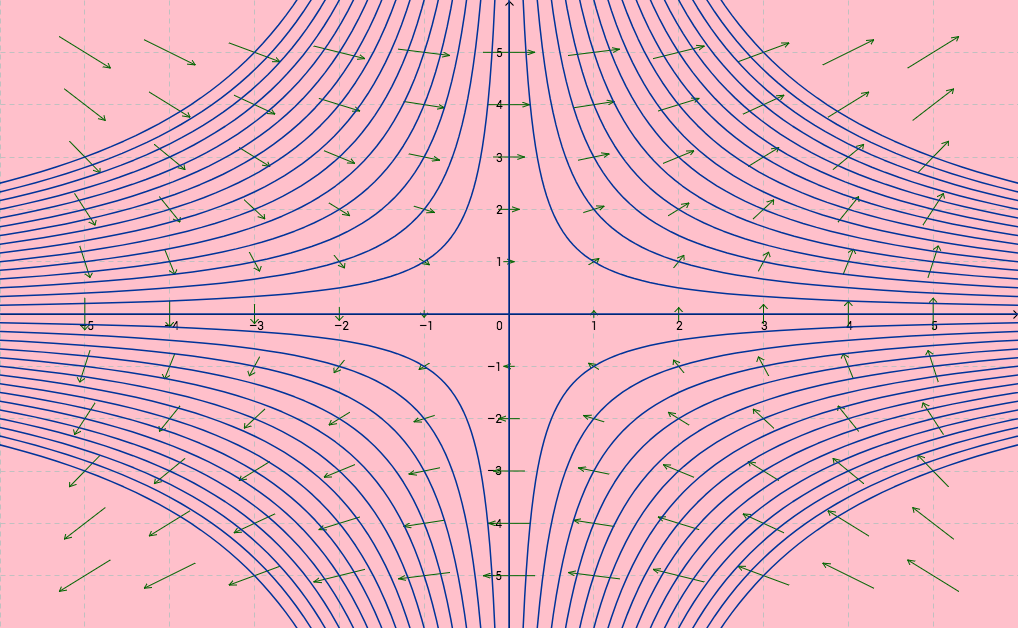
Esimerkin kuvassa funktion gradienttivektorit ovat kohtisuorassa tasa-arvokäyriä vastaan. Tämä ei ole sattumaa vaan gradienttivektorit ovat aina kohtisuorassa tasa-arvojoukkoja vastaan. Funktioiden tapauksessa tätä ominaisuutta voi pohtia seuraavasti: olkoon =c\}") funktion jokin tasa-arvokäyrä ja olkoon piste
funktion jokin tasa-arvokäyrä ja olkoon piste  tällä käyrällä. Halutaan, että funktion arvo kasvaa annetun määrän ja etsitään suuntaa, jossa tämä muutos saavutetaan siirtämällä pistettä vähiten. Pienin siirto tulee siihen suuntaan, jossa isompia arvoja vastaavat tasa-arvokäyrät ovat tiheimmässä. Toisaalta gradientti osoittaa suurimman kasvunopeuden suuntaan. Pienessä mittakaavassa katsottuna eli pienellä arvon
tällä käyrällä. Halutaan, että funktion arvo kasvaa annetun määrän ja etsitään suuntaa, jossa tämä muutos saavutetaan siirtämällä pistettä vähiten. Pienin siirto tulee siihen suuntaan, jossa isompia arvoja vastaavat tasa-arvokäyrät ovat tiheimmässä. Toisaalta gradientti osoittaa suurimman kasvunopeuden suuntaan. Pienessä mittakaavassa katsottuna eli pienellä arvon  lisäyksellä tasa-arvokäyrät ovat suoria ja kahden samansuuntaisen suoran välisen lyhimmän matkan antaa suora, joka on kohtisuorassa edellisiä suoria vastaan.
lisäyksellä tasa-arvokäyrät ovat suoria ja kahden samansuuntaisen suoran välisen lyhimmän matkan antaa suora, joka on kohtisuorassa edellisiä suoria vastaan.
Ääriarvoista
Neuroverkkoa koulutettaessa halutaan minimoida monesta parametrista riippuvaa virhefunktiota. Yhden muuttujan funktioiden ääriarvojen etsiminen derivaatan nollakohtien avulla yleistyy useamman muuttujan funktion tilanteeseen niin, että mahdolliset ääriarvopisteet ovat ne pisteet, joissa kaikki osittaisderivaatat ovat nollia.
Olkoon väli.
Jos on
, siten, että kaikilla , joille  , niin on funktion lokaali maksimipiste ja lokaali maksimi eli suurin arvo.
, niin on funktion lokaali maksimipiste ja lokaali maksimi eli suurin arvo.Jos on
, siten, että kaikilla , joille , niin on funktion lokaali minimipiste ja lokaali minimi eli pienin arvo.
Globaalit ääriarvot ja ääriarvopisteet määritellään kuten yhden muuttujan funktion tapauksessa.
Yhden muuttujan jatkuvan funktion ääriarvojen olemassaolotulos pätee myös yleisemmässä tapauksessa. (Tulos on totta yleisemmällekin määrittelyjoukolle kuin suljetuille väleille. Riittää, että joukko on kompakti eli suljettu ja rajoitettu.)
Lause (Ääriarvolause)
Olkoon suljettu ja rajoitettu väli. Olkoon jatkuva funktio. Tällöin funktio saavuttaa välillä  suurimman ja pienimmän arvonsa.
suurimman ja pienimmän arvonsa.
Funktioiden kuvaajia katsottaessa on intuitiivisesti selvää, että funktion lokaaleissa ääriarvopisteissä tangettitaso on vaakasuorassa eli -tason suuntainen. Tällaisten tasojen yhtälöt ovat muotoa  , joten tangenttitason yhtälön perusteella nähdään, että funktion osittaisderivaatat muuttujien ja suhteen ovat nollia ja että kuvaajan tangenttitason yhtälö pisteessä on
, joten tangenttitason yhtälön perusteella nähdään, että funktion osittaisderivaatat muuttujien ja suhteen ovat nollia ja että kuvaajan tangenttitason yhtälö pisteessä on ") .
.
Osittaisderivaattojen nolluus ääriarvopisteissä yleistyy myös useamman muuttujan funktioille. Derivaatan määritelmän ja yhden muuttujan funktion tulosten avulla on helppo näyttää, että jos funktiolla , , on lokaali ääriarvo pisteessä ja funktiolla on osittaisderivaatat pisteessä , niin =0") kaikilla eli
kaikilla eli =0.")
Suljetulla välillä määritellyn funktion ääriarvoja etsittäessä riittää siis selvittää funktion arvo niissä pisteissä, joissa gradientti on nolla, niissä pisteissä, joissa jotain osittaisderivaattaa ei ole olemassa ja välin reunapisteissä. Gradientin nollakohtia ja pisteitä, joissa jotain osittaisderivaattaa ei ole olemassa, sanotaan kriittisiksi pisteiksi (critical points). Muulla kuin suljetulla välillä määritellylle funktiolle pitää tutkia funktion käyttäytymistä välin reunapisteissä esimerkiksi raja-arvojen avulla.
Esimerkki
Olkoon , =xy-x^2-y^2+3") . Nyt
. Nyt  Yhtälöparin
Yhtälöparin  ainoa ratkaisu on
ainoa ratkaisu on  , joten piste
, joten piste ") on funktion ainoa kriittinen piste ja funktion kuvaajan tangenttitaso siinä pisteessä on
on funktion ainoa kriittinen piste ja funktion kuvaajan tangenttitaso siinä pisteessä on =3") . Se, että on funktion globaali maksimipiste selviää tutkimalla funktion raja-arvoja kun
. Se, että on funktion globaali maksimipiste selviää tutkimalla funktion raja-arvoja kun  .
. 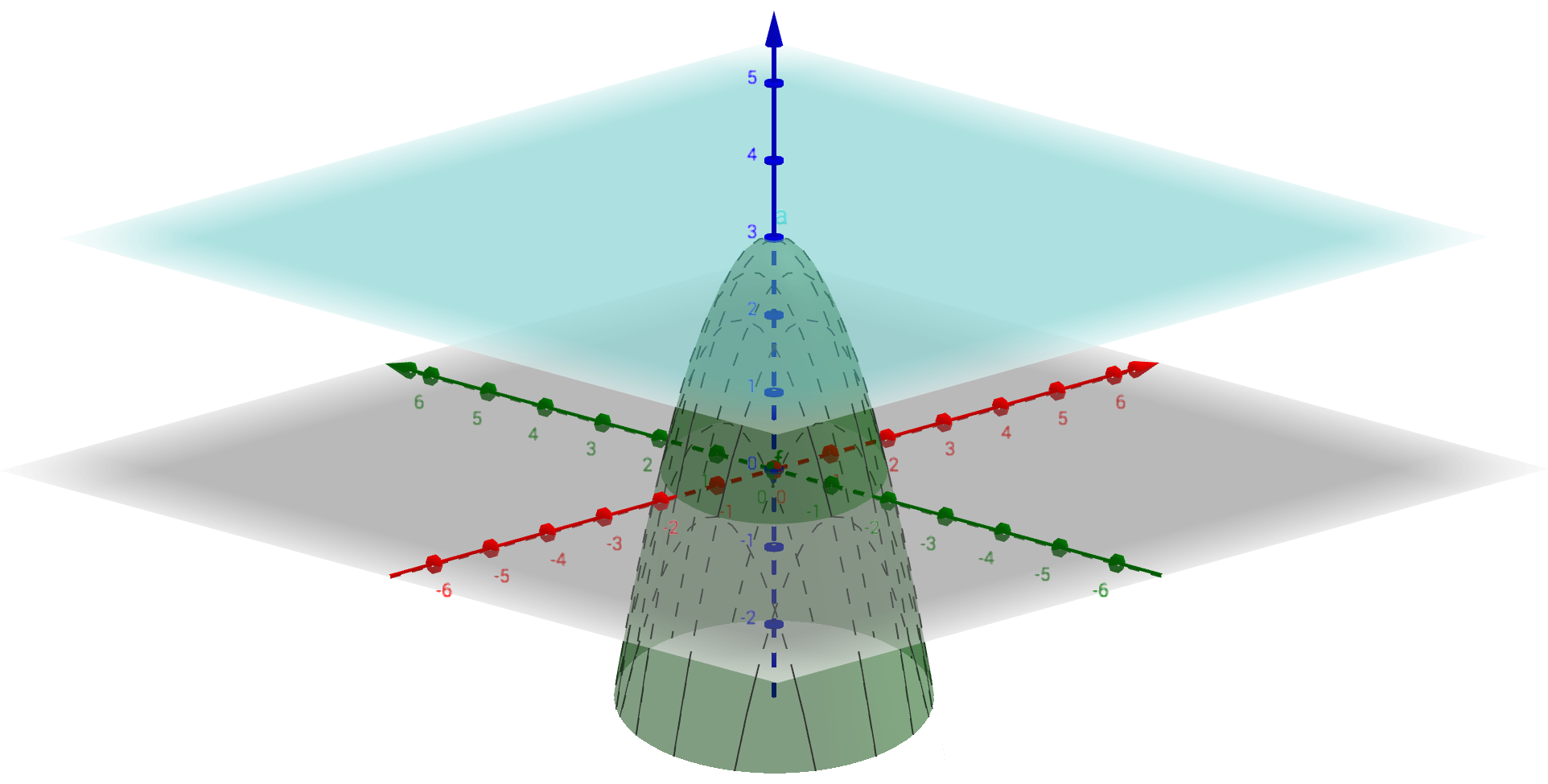
Esimerkki
Funktiolla , =\cos (2\pi x)\cos(2\pi y) e^{-x^2-y^2}") on useita maksimi- ja minimipisteitä. Sillä on globaali maksimi pisteessä .
on useita maksimi- ja minimipisteitä. Sillä on globaali maksimi pisteessä . 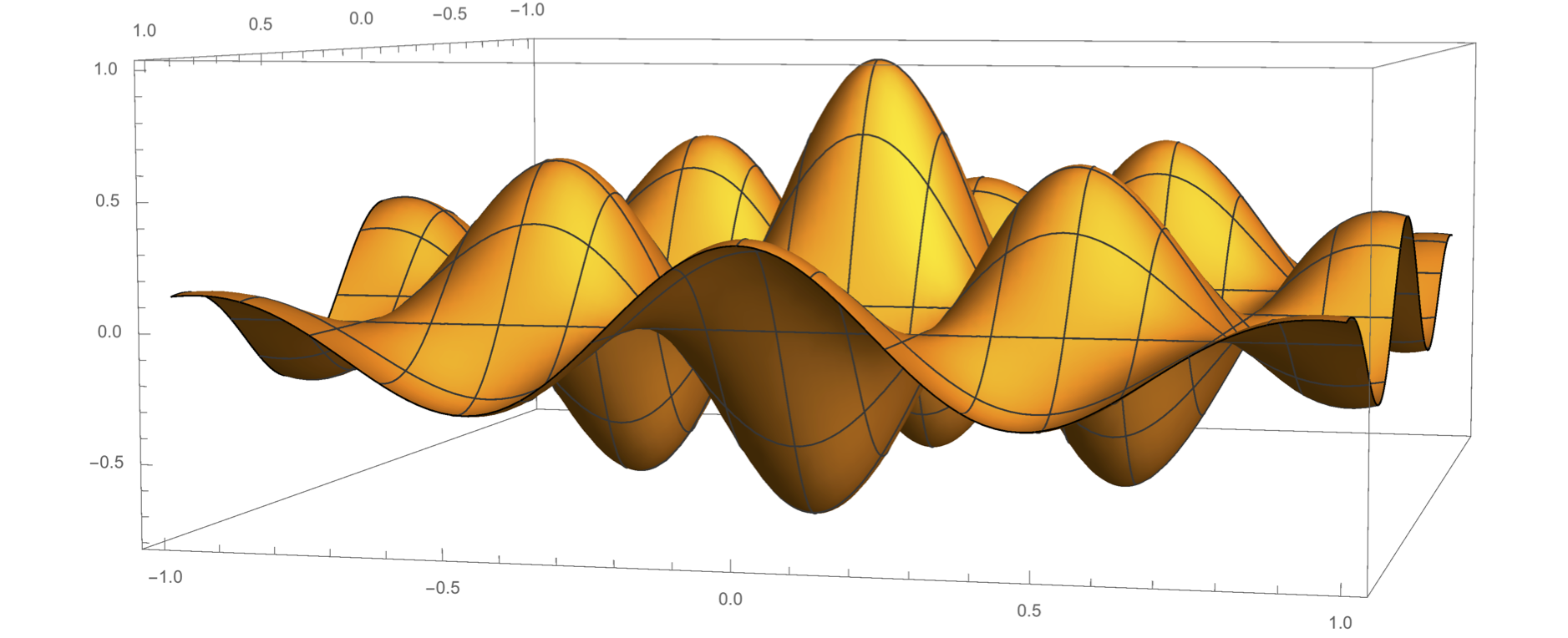
Ääriarvopisteissä funktion gradientti on nolla, mutta gradientin nolluus ei takaa sitä, että piste on funktion ääriarvopiste. Pistettä, jossa =0") mutta kaikilla
mutta kaikilla  on piste ja , joille
on piste ja , joille  ,
,  ,
, <f(x)") ja
ja >f(x)") , sanotaan funktion satulapisteeksi. Funktion kriittisten pisteiden laatua eli sitä, ovatko ne lokaaleja maksimi- tai minimipisteitä vai satulapisteitä voidaan tutkia esimerkiksi toisen kertaluvun osittaisderivaattojen merkin avulla.
, sanotaan funktion satulapisteeksi. Funktion kriittisten pisteiden laatua eli sitä, ovatko ne lokaaleja maksimi- tai minimipisteitä vai satulapisteitä voidaan tutkia esimerkiksi toisen kertaluvun osittaisderivaattojen merkin avulla.
Esimerkki
Piste on funktioiden  ,
, =y^2-x^2\quad\text{ja}\quad
g(x,y)=\frac{xy(x^2-y^2)}{x^2+y^2}") satulapiste.
satulapiste. 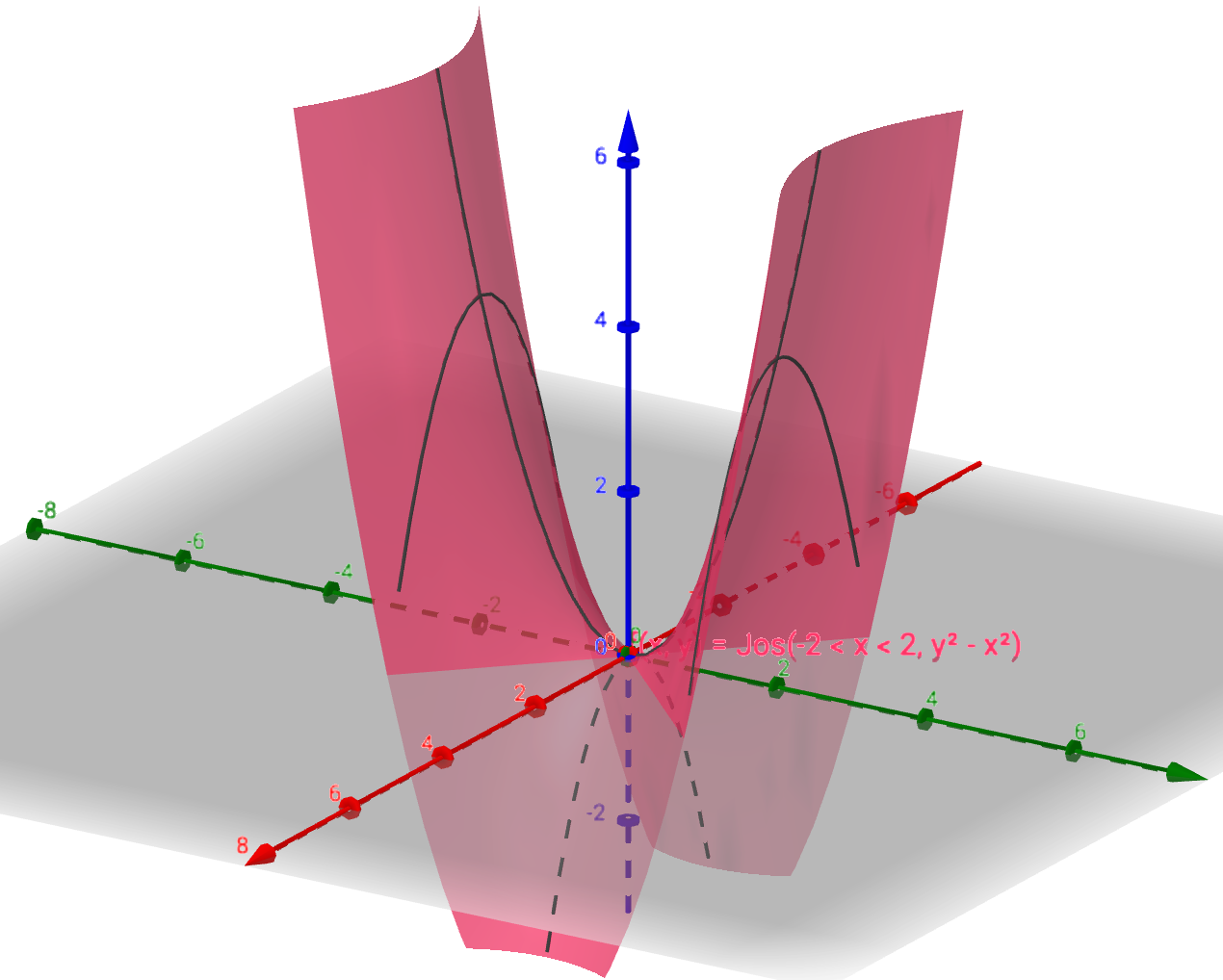
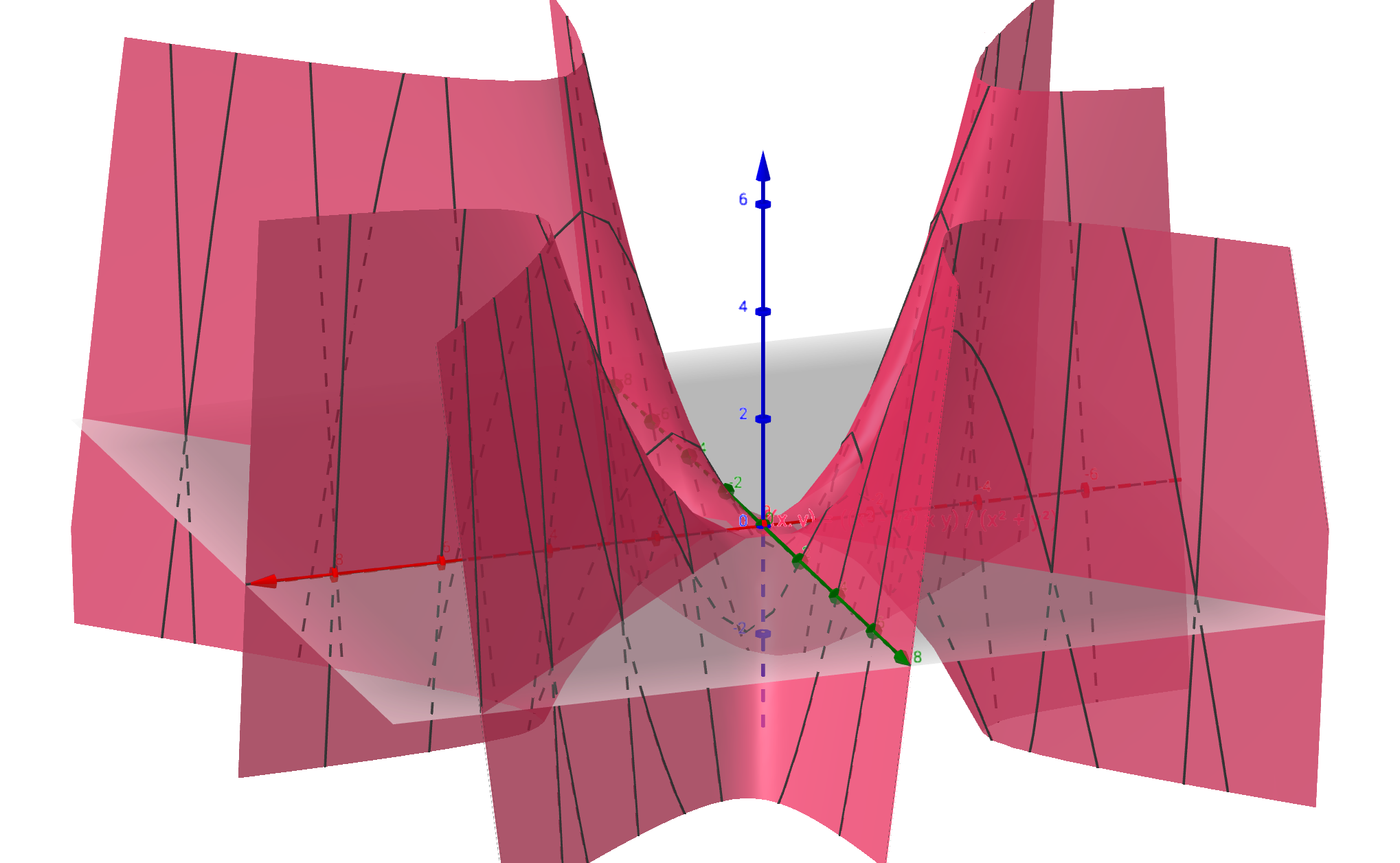
Osittaisderivaattojen ketjusääntö
Vastavirta-algoritmissa virhefunktion osittaisderivaattoja piilokerroksen painojen suhteen laskettaessa huomattiin, että muuttuja, jonka suhteen halutaan derivoida, riippuu edellisen kerroksen parametreista. Tämän takia tarvittiin osittaisderivaattojen ketjusääntöä.
Tarkastellaan ensin yksinkertaista tilannetta. Olkoon funktio, jonka parametrit ja ovat muuttujan  funktioita
funktioita  . Funktioiden välistä yhteyttä voi havainnollistaa puumaisella kaaviolla. Funktion osittaisderivaatan kaavan muuttujan suhteen (tässä tapauksessa tavallisen derivaatan) voi muistaa siitä, että kuvassa edetään funktion ja derivointimuuttujan väli kaikkia reittejä pitkin, kerrotaan matkalla olevat osittaisderivaatat keskenään ja lasketaan eri reittien osittaisderivaattojen tulot yhteen.
. Funktioiden välistä yhteyttä voi havainnollistaa puumaisella kaaviolla. Funktion osittaisderivaatan kaavan muuttujan suhteen (tässä tapauksessa tavallisen derivaatan) voi muistaa siitä, että kuvassa edetään funktion ja derivointimuuttujan väli kaikkia reittejä pitkin, kerrotaan matkalla olevat osittaisderivaatat keskenään ja lasketaan eri reittien osittaisderivaattojen tulot yhteen.
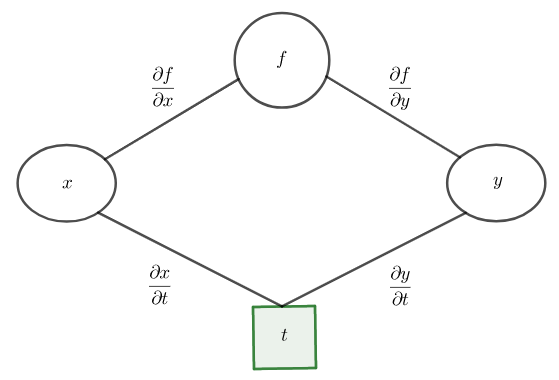
Jos funktiolla on jatkuvat osittaisderivaatat muuttujien ja suhteen ja funktiot ja ovat derivoituvia, niin funktion derivaatta muuttujan suhteen on =\frac{\partial f}{\partial t}(t)=\frac{\partial f}{\partial x}(x(t),y(t))\cdot x'(t) + \frac{\partial f}{\partial y}(x(t),y(t))\cdot y'(t),") josta Leibnizin merkinnöin kirjoitettu versio on
josta Leibnizin merkinnöin kirjoitettu versio on 
Esimerkki
Olkoot ,  ja
ja  ,
, =2t, \quad y(t)=t^2-1\quad\text{ja}\quad f(x,y)=x^2-2xy.") Lasketaan funktion derivaatta muuttujan suhteen. Muuttujia on vain yksi ja osittaisderivaatta on funktion
Lasketaan funktion derivaatta muuttujan suhteen. Muuttujia on vain yksi ja osittaisderivaatta on funktion ,g(t))") tavallinen derivaatta. Tässä tapauksessa derivaatta osattaisiin laskea ilman ketjusääntöäkin sijoittamalla funktioiden ja lausekkeet funktion lausekkeeseen
tavallinen derivaatta. Tässä tapauksessa derivaatta osattaisiin laskea ilman ketjusääntöäkin sijoittamalla funktioiden ja lausekkeet funktion lausekkeeseen =x(t)^2-2x(t)y(t)=(2t)^2-2(2t)(t^2-1)=-4t^3+4t^2+4t,") joten
joten =-12t^2+8t+4.") Osittaisderivaattojen ketjusääntöä käyttämällä saadaan
Osittaisderivaattojen ketjusääntöä käyttämällä saadaan &=\frac{\partial f}{\partial t}
=\frac{\partial f}{\partial x}\frac{\partial x}{\partial t}
+\frac{\partial f}{\partial y}\frac{\partial y}{\partial t}\\
&=(2x-2y)2-2x2t
=4x-4y-4xt\\
&=4(2t-t^2+1-2t^2)
=-12t^2+8t+4.
\end{aligned}")
Yleinen versio osittaisderivaattojen ketjusäännöstä on seuraava. Olkoon , =f(u_1,\dots,u_n)\in\mathbb R,") missä
missä  on funktio
on funktio  , kaikilla . Jos funktiolla on jatkuvat osittaisderivaatat
, kaikilla . Jos funktiolla on jatkuvat osittaisderivaatat  kaikilla ja funktioilla on osittaisderivaatat
kaikilla ja funktioilla on osittaisderivaatat  kaikilla ja kaikilla
kaikilla ja kaikilla  , niin funktion osittaisderivaatat muuttujien
, niin funktion osittaisderivaatat muuttujien  suhteen saadaan kaavalla
suhteen saadaan kaavalla 
Laskettaessa osittaisderivaattaa muuttujan suhteen funktio siis osittaisderivoidaan kaikkien muuttujiensa suhteen ja muuttujat muuttujan suhteen. Nämä osittaisderivaatat kerrotaan keskenään ja lasketaan yhteen. Puukaavion lisäksi kaavan voi muistaa miettimällä, että muuttujan muuttaminen vaikuttaa funktioiden  arvoihin ja siten muutos funktion arvossa saadaan laskemalla nämä muutokset (osittaisderivaatat) yhteen.
arvoihin ja siten muutos funktion arvossa saadaan laskemalla nämä muutokset (osittaisderivaatat) yhteen.
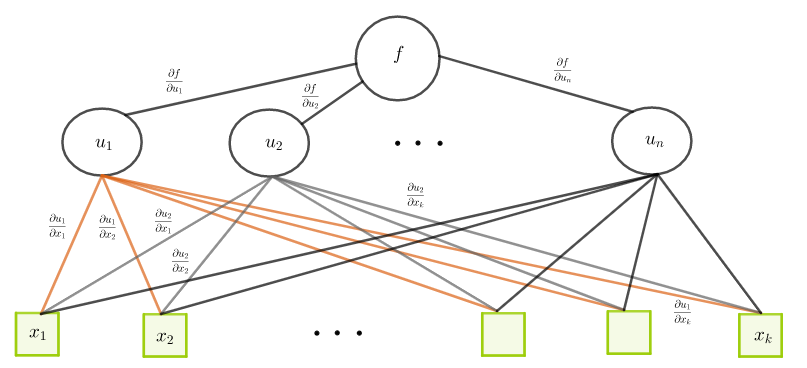
Esimerkki
Olkoot  ,
, =u_1^2-u_1u_2+3u_2^2,
\quad u_1(x_1,x_2)=x_1+x_2\quad \text{ja}\quad
u_2(x_1,x_2)=x_1-x_2.") Nyt
Nyt 
 Funktion osittaisderivaatat muuttujien
Funktion osittaisderivaatat muuttujien  ja
ja  suhteen ovat
suhteen ovat \cdot1+(-u_1+6u_2)\cdot1\\
&=u_1+5u_2=6x_1-4x_2
\end{aligned}") ja
ja \cdot1+(-u_1+6u_2)\cdot(-1)\\
&=3u_1-7u_2=-4x_1+10x_2.
\end{aligned}") Halutut osittaisderivaatat voi laskea myös sijoittamalla funktioiden
Halutut osittaisderivaatat voi laskea myös sijoittamalla funktioiden  ja
ja  lausekkeet funktioon ja osittaisderivoimalla muuttujien ja suhteen.
lausekkeet funktioon ja osittaisderivoimalla muuttujien ja suhteen.
3.1.8 Harjoitustehtäviä
Olkoon
, , =xy, \quad x(t)=\cos t\quad \text{ja}\quad y(t)=\sin t.") Laske funktion derivaatta
Laske funktion derivaatta ") sekä sijoittamalla funktioiden ja lausekkeet funktioon että osittaisderivaattojen ketjusäännön avulla.
sekä sijoittamalla funktioiden ja lausekkeet funktioon että osittaisderivaattojen ketjusäännön avulla.Olkoon
 ,
,  ,
, =u_1+2u_2+u_3^2,")
=\frac{x_1}{x_2},\quad u_2(x_1,x_2)=x_1^2+\log x_2,
\quad\text{ja}\quad u_3(x_1,x_2)=2x_1.") Laske funktion osittaisderivaatat
Laske funktion osittaisderivaatat  ja
ja  .
.
Lisätietoa osittaisderivaatoista
3.2 Lineaarialgebraa
Neuroverkon rakennetta esiteltäessä verkon parametreille ja niihin liittyville kaavoille annettiin myös vektori- ja matriisiesitykset. Ohjelmistokirjastoissa on paljon vektori- ja matriisilaskentaan sopivia paketteja, joiden avulla neuroverkon syötteiden tuloksen laskeminen ja parametreihin liittyvien laskujen tekeminen esimerkiksi virhefunktion minimoinnin yhteydessä on paljon nopeampaa kuin yksittäisten parametrien käsittely silmukoiden avulla.
Tässä luvussa käydään läpi vektoreihin ja matriiseihin liittyviä peruskäsitteitä, laskusääntöjä ja ominaisuuksia. Niihin liittyvää materiaalia löytyy Linear Algebra -nimisistä kirjoista. Motivointi lineaarialgebraan tehdään monesti lineaarisen yhtälöryhmän ratkaisemisen kautta.
3.2.1 Kahden lineaarisen yhtälön yhtälöryhmä
Tarkastellaan johdatuksena kahden muuttujan lineaarisista yhtälöistä muodostuvan yhtälöparin  missä
missä  kaikilla
kaikilla  , ratkaisemista. Paria , joka toteuttaa yhtälöparin molemmat yhtälöt, sanotaan yhtälöparin ratkaisuksi. Yhtälöparin ratkaisujen olemassaolo ja yksikäsitteisyys riippuu kertoimista
, ratkaisemista. Paria , joka toteuttaa yhtälöparin molemmat yhtälöt, sanotaan yhtälöparin ratkaisuksi. Yhtälöparin ratkaisujen olemassaolo ja yksikäsitteisyys riippuu kertoimista  .
.
Esimerkki
Tutkitaan yhtälöpareja }
\begin{cases}
x-y=7,\\
x+y=5,
\end{cases}\quad
\text{(b)}
\begin{cases}
x-y=7,\\
2x-2y=14
\end{cases}\quad
\text{(c)}
\begin{cases}
x-y=7,\\
2x-2y=13.
\end{cases}") Yhtälöparista (a) saadaan laskemalla yhtälöt puolittain yhteen ja jakamalla kahdella että
Yhtälöparista (a) saadaan laskemalla yhtälöt puolittain yhteen ja jakamalla kahdella että  . Sijoittamalla tämä toiseen yhtälöön saadaan
. Sijoittamalla tämä toiseen yhtälöön saadaan  . Tästä seuraa, että
. Tästä seuraa, että ") on yhtälöparin ainoa ratkaisu.
on yhtälöparin ainoa ratkaisu.
Yhtälöparin (b) toinen yhtälö on ensimmäinen yhtälö kerrottuna luvulla  . Tämän yhtälön toteuttavat kaikki lukuparit , joille
. Tämän yhtälön toteuttavat kaikki lukuparit , joille  . Siten yhtälöparilla on äärettömän monta ratkaisua.
. Siten yhtälöparilla on äärettömän monta ratkaisua.
Kerrottaessa yhtälöparin (c) ensimmäinen yhtälö kahdella, saadaan yhtälöpari, jonka molempien yhtälöiden vasen puoli on  . Koska oikeat puolet eivät ole samat, niin yhtälöparilla ei ole ratkaisua.
. Koska oikeat puolet eivät ole samat, niin yhtälöparilla ei ole ratkaisua.
Yhtälöparien geometrinen tulkinta tehdään suorien avulla. Parien yhtälöt ovat suorien yhtälöitä tasossa. Ne pisteet, jotka ovat molemmilla suorilla, ovat yhtälöparin ratkaisuja. Kaksi suoraa ovat joko erisuuntaisia tai samansuuntaisia (eri tai sama kulmakerroin). Jos ne ovat erisuuntaisia, niin ne leikkaavat toisensa täsmälleen yhdessä pisteessä. Tapauksessa (a) yhtälöparin ratkaisu on yhtälöitä vastaavien suorien yksikäsitteinen leikkauspiste. Tapauksessa (b) suorat ovat samat eli kaikki suoran pisteet ovat leikkauspisteitä. Tapauksessa (c) suorat ovat samansuuntaisia eri suoria, joten ne eivät leikkaa toisiaan.
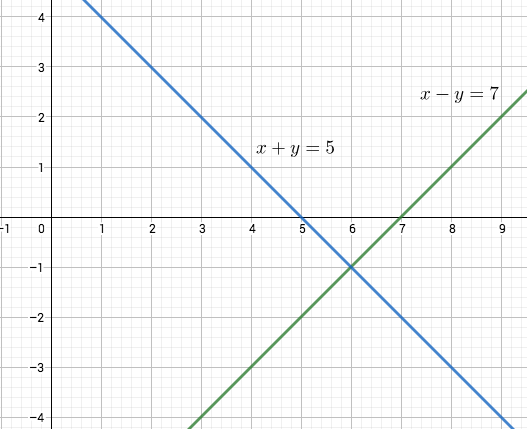
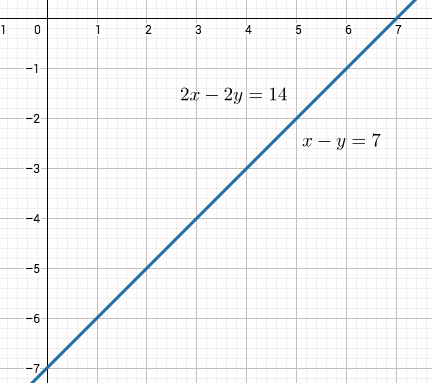
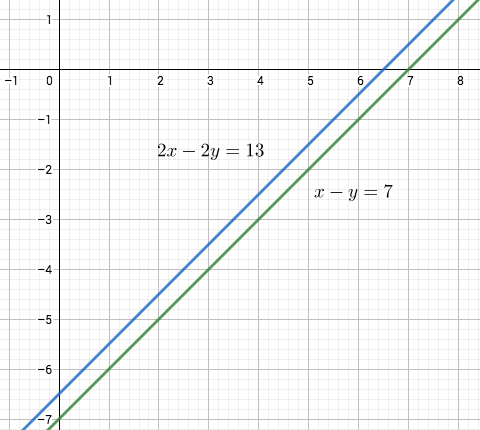
Kertomalla yhtälöparin ensimmäinen yhtälö puolittain luvulla  ja toinen luvulla
ja toinen luvulla  ja vähentämällä yhtälöt toisistaan nähdään, että jos
ja vähentämällä yhtälöt toisistaan nähdään, että jos  , niin sijoittamalla luku
, niin sijoittamalla luku  yhtälöpariin saadaan ja ratkaisu . Erotusta
yhtälöpariin saadaan ja ratkaisu . Erotusta  sanotaan yhtälöparin determinantiksi.
sanotaan yhtälöparin determinantiksi.
Tämä liittyy yhtälöparin geometriseen tulkintaan sillä yhtälöparin ensimmäisen suoran kulmakerroin on  ja toisen
ja toisen  . Yhtälöparilla on siis täsmälleen yksi ratkaisu jos ja vain jos sen determinantti ei ole nolla (erisuuret kulmakertoimet). Sillä ei ole ratkaisuja tai niitä on äärettömän monta jos ja vain jos determinantti on nolla (samat kulmakertoimet).
. Yhtälöparilla on siis täsmälleen yksi ratkaisu jos ja vain jos sen determinantti ei ole nolla (erisuuret kulmakertoimet). Sillä ei ole ratkaisuja tai niitä on äärettömän monta jos ja vain jos determinantti on nolla (samat kulmakertoimet).
3.2.2 Yhtälöryhmä, jossa on lineaarista yhtälöä ja tuntematonta
Yleisessä tapauksessa on yhtälöä ja muuttujaa  missä kaikilla
missä kaikilla  ,
,  ja tavoitteena on löytää luvun joukot
ja tavoitteena on löytää luvun joukot  , jotka toteuttavat kaikki ryhmän yhtälöä.
, jotka toteuttavat kaikki ryhmän yhtälöä.
Tällaisen yhtälöryhmän ratkaisemisessa voidaan käyttää matriiseja. Tunnetussa Gauss-Jordan-menetelmässä yhtälöiden kertoimista muodostetaan kerroinmatriisi, ") jota muunnetaan kerto-, yhteen- ja vähennyslaskuja sisältävillä rivioperaatioilla sellaiseen muotoon, josta ratkaisu (tai sen olemassaolemattomuus) saadaan helposti selville peräkkäisillä sijoituksilla.
jota muunnetaan kerto-, yhteen- ja vähennyslaskuja sisältävillä rivioperaatioilla sellaiseen muotoon, josta ratkaisu (tai sen olemassaolemattomuus) saadaan helposti selville peräkkäisillä sijoituksilla.
3.2.3 Vektorit ja matriisit
Vektorit
Vektorit ja matriisit koostuvat järjestetyistä alkioista, jotka voivat olla mitä tahansa (reaalilukuja, vektoreita, funktioita). Keskitytään tässä tilanteeseen, jossa alkiot ovat reaalilukuja. Vektoreista tarvitaan sekä pysty- että vaakaversiot, jotta matriisien ja vektoreiden keskenäiset laskutoimitukset saadaan hoidettua muodollisesti oikein.
Olkoon  . Olkoot ,
. Olkoot ,  ,
,  . Järjestetty joukko on -ulotteinen (rivi)vektori. Järjestetty joukko
. Järjestetty joukko on -ulotteinen (rivi)vektori. Järjestetty joukko  on -ulotteinen (sarake)vektori. Luvut , ,
on -ulotteinen (sarake)vektori. Luvut , ,  ovat vektorin komponentteja.
ovat vektorin komponentteja.
Vektoreiden samuus, vektorin kertominen vakiolla ja (samanulotteisten) vektoreiden yhteenlasku määritellään luonnollisella tavalla.
Olkoot ") ja
ja ") -vektoreita. Olkoon . Nyt
-vektoreita. Olkoon . Nyt  jos ja vain jos
jos ja vain jos  kaikilla
kaikilla  ,
, ") ja
ja .")
Reaalilukujen laskusäännöistä seuraa, että vektoreiden yhteenlasku on vaihdannainen, liitännäinen ja distributiivinen (osittelulaki) eli jos  , ja ovat -vektoreita ja , niin
, ja ovat -vektoreita ja , niin =(u+v)+w\quad \text{ja}\quad c(u+v)=cu+cv.") Jos
Jos \in\mathbb R^n") ja
ja \in\mathbb R^n") , niin vektoreiden ja sisätulo/pistetulo on
, niin vektoreiden ja sisätulo/pistetulo on 
Esimerkki
Olkoot ") ja
ja ") . Nyt
. Nyt )=(7,2,1)") ja
ja \cdot2+3\cdot(-1)=3-4-3=-4") ja samat laskut Pythonin NumPy-kirjaston avulla:
ja samat laskut Pythonin NumPy-kirjaston avulla:
Matriisit
Olkoot  . Olkoot
. Olkoot  kaikilla ja . Järjestetty taulukko
kaikilla ja . Järjestetty taulukko =
\begin{pmatrix}
a_{11}&a_{12}&\cdots&a_{1n}\\
a_{21}&a_{22}&\cdots&a_{2n}\\
\vdots&\vdots&\cdots&\vdots\\
a_{m1}&a_{m2}&\cdots&a_{mn}
\end{pmatrix}") on
on  -matriisi, jossa on riviä ja saraketta.
-matriisi, jossa on riviä ja saraketta.
Luvut ovat matrisin alkioita/komponetteja, rivivektorit ") , , sen rivejä (row) ja sarakevektorit
, , sen rivejä (row) ja sarakevektorit  , sen sarakkeita (column).
, sen sarakkeita (column).
Jos  , niin matriisi on neliömatriisi (square matrix).
, niin matriisi on neliömatriisi (square matrix).
Huomaa, että rivivektori ") on
on  -matriisi ja -komponentin sarakevektori on
-matriisi ja -komponentin sarakevektori on  -matriisi.
-matriisi.
Matriisien yhtäsuuruus, vakiolla kertominen ja yhteenlasku määritellään samaan tapaan kuin vastaavat ominaisuudet vektoreille.
Olkoot ") ja
ja ") -matriiseja. Olkoon . Matriisit ja ovat yhtäsuuret jos ja vain jos
-matriiseja. Olkoon . Matriisit ja ovat yhtäsuuret jos ja vain jos  kaikilla ja ,
kaikilla ja , =
\begin{pmatrix}
ca_{11}&ca_{12}&\cdots&ca_{1n}\\
ca_{21}&ca_{22}&\cdots&ca_{2n}\\
\vdots&\vdots&\cdots&\vdots\\
ca_{m1}&ca_{m2}&\cdots&ca_{mn}
\end{pmatrix}") ja
ja =
\begin{pmatrix}
a_{11}+b_{11}&a_{12}+b_{12}&\cdots&a_{1n}+b_{1n}\\
a_{21}+b_{21}&a_{22}+b_{22}&\cdots&a_{2n}+b_{2n}\\
\vdots&\vdots&\cdots&\vdots\\
a_{m1}+b_{m1}&a_{m2}+b_{m2}&\cdots&a_{mn}+b_{mn}
\end{pmatrix}.")
Huomaa, että jos matriisit ja ovat erikokoisia, niin niitä ei voi laskea yhteen.
Reaalilukujen ominaisuuksista ja matriisien summan ja vakiolla kertomisen määrittelystä seuraa, että matriisien laskutoimitukset käyttäytyvät seuraavasti.
Olkoot , ja -matriiseja. Olkoon . Olkoon  -matriisi, jonka kaikki alkiot ovat nollia. Tällöin
-matriisi, jonka kaikki alkiot ovat nollia. Tällöin
 ,
, ,
, ,
,+C=A+(B+C)") ,
,=cA+cB") ,
, .
.
Esimerkki
Matriiseille  on
on  ja samat laskut Pythonin NumPy-kirjaston avulla:
ja samat laskut Pythonin NumPy-kirjaston avulla:
3.2.4 Harjoitustehtäviä
Olkoot
") ja
ja ") . Laske summa
. Laske summa  ja sisätulo
ja sisätulo  .
.Olkoot
, ja -vektoreita. Olkoon ") -ulotteinen nollavektori. Olkoon . Osoita, että
-ulotteinen nollavektori. Olkoon . Osoita, että =u\cdot v+u\cdot w
\quad\text{ja}\quad(cu)\cdot v=c(u\cdot v).")
Olkoot
 Laske matriisit
Laske matriisit  ,
,  ,
,  ja
ja  .
.
Pitäisi varmaan olla (cu)dot v eikä (cvu)dot v tehtävässä 2
—Joo. Kiitos.
—Pikaisesti ajateltuna kahden matriisin tulo olisi matriisi, jossa tekijämatriisien saman indeksin alkiot kerrottaisiin keskenään samoin kuin ne lasketaan yhteen matriisien summassa. Tämän määritelmän antamalla tulolla ei ole riittävästi matriisien tulolta haluttavia ominaisuuksia. Sitä kuitenkin käytetään joissain yhteyksissä, esimerkiksi neuroverkon parametrien kaavoissa.
Olkoot ja -matriiseja. Matriisien ja Hadamardin tulo/Schurin tulo on =
\begin{pmatrix}
a_{11}b_{11}&a_{12}b_{12}&\cdots&a_{1n}b_{1n}\\
a_{21}b_{21}&a_{22}b_{22}&\cdots&a_{2n}b_{2n}\\
\vdots&\vdots&\cdots&\vdots\\
a_{m1}b_{m1}&a_{m2}b_{m2}&\cdots&a_{mn}b_{mn}.
\end{pmatrix}.")
Yleisemmin käytettävä matriisien tulo määritellään vektoreiden sisätulon avulla. Matriisien ja tulon  . alkio on matriisin . rivin ja matriisin . sarakkeen vektoreiden sisätulo.
. alkio on matriisin . rivin ja matriisin . sarakkeen vektoreiden sisätulo.
Olkoon -matriisi ja  -matriisi. Matriisien ja tulo
-matriisi. Matriisien ja tulo  on
on  -matriisi
-matriisi ") , jolle
, jolle 
Matriisitulo on liitännäinen eli jos on - matriisi, on  -matriisi ja on
-matriisi ja on  -matriisi, niin
-matriisi, niin =(AB)C") ja tulo on -matriisi. Osittelulaki (yhteen- ja kertolaskun suhteen oikean kokoisille) on myös voimassa eli
ja tulo on -matriisi. Osittelulaki (yhteen- ja kertolaskun suhteen oikean kokoisille) on myös voimassa eli =AB+AC") ja
ja C=AC+BC.") Matriisitulo ei yleensä ole vaihdannainen eli
Matriisitulo ei yleensä ole vaihdannainen eli  . Tulo ei ole edes määritelty paitsi jos sekä että ovat -matriiseja jollain .
. Tulo ei ole edes määritelty paitsi jos sekä että ovat -matriiseja jollain .
Esimerkki
Olkoot  ja
ja 
Koska on  -matriisi ja on
-matriisi ja on  -matriisi, niin tulo on
-matriisi, niin tulo on  -matriisi,
-matriisi, 
3.2.5 Harjoitustehtäviä
Näytä, että matriisien Hadamard-tulo on vaihdannainen, liitännäinen ja distributiivinen: Jos
 ja ovat -matriiseja, niin
ja ovat -matriiseja, niin  ,
, =(A\circ B)\circ C") ja
ja =A\circ B+A\circ C") .
.Olkoot
 Laske tulot
Laske tulot  ja .
ja .
Olkoon -matriisi. on diagonaalimatriisi, jos  aina, kun
aina, kun  .
.
on yksikkömatriisi, jos se on diagonaalimatriisi ja  kaikilla .
kaikilla .
Matriisi on ylä(ala)kolmiomatriisi, jos kaikki komponentit diagonaalin ala(ylä)puolella ovat nollia.
Laskutoimitusten helpottamiseksi yleinen matriisi pyritään monesti esittämään kahden tai kolmen matriisin tulona, jossa tulon matriisit ovat diagonaali- tai kolmiomatriiseja.
Esimerkki
Olkoot  Matriisit ja ovat diagonaalimatriiseja ja on myös yksikkömatriisi. Matriisi on yläkolmiomatriisi ja on alakolmiomatriisi.
Matriisit ja ovat diagonaalimatriiseja ja on myös yksikkömatriisi. Matriisi on yläkolmiomatriisi ja on alakolmiomatriisi.
Yksikkömatriisi käyttäytyy matriisien kertolaskussa kuten luku reaalilukujen kertolaskussa. Jos on -matriisi ja  on -yksikkömatriisi, niin
on -yksikkömatriisi, niin  Muista, että kaikilla reaaliluvuilla
Muista, että kaikilla reaaliluvuilla  on käänteisluku
on käänteisluku  , jolle
, jolle  . Osalla neliömatriiseista on vastaava käänteisalkio.
. Osalla neliömatriiseista on vastaava käänteisalkio.
Olkoot ja -matriiseja. Jos  niin on matriisin käänteismatriisi, jota merkitään usein
niin on matriisin käänteismatriisi, jota merkitään usein  . Tällöin sanotaan, että matriisi on kääntyvä.
. Tällöin sanotaan, että matriisi on kääntyvä.
Käänteismatriisin käsin laskeminen on yleensä työlästä. Se onnistuu Gauss-Jordan menetelmällä; kaavan oikean puolen vektori korvataan yksikkömatriisilla . Jos saadaan rivioperaatioilla muunnettua yksikkömatriisiksi, niin on kääntyvä ja käänteismatriisi löytyy viivan oikealta puolelta. Käänteismatriisin etsinnässä riittää löytää , jolle  tai
tai  . Tällöin voidaan näyttää, että
. Tällöin voidaan näyttää, että  .
.
Esimerkki
Olkoon  Jos matriisilla on käänteismatriisi , niin
Jos matriisilla on käänteismatriisi , niin  ,
,  eli on oltava
eli on oltava  Koska nyt myös
Koska nyt myös  , niin on itsensä käänteismatriisi.
, niin on itsensä käänteismatriisi.
Determinantti
Neliömatriisin kääntyvyyttä voidaan testata determinantin avulla. -matriisin  determinatti on reaaliluku
determinatti on reaaliluku 
Käänteismatriisin määritelmän avulla on helppo näyttää, että jos  , niin on kääntyvä ja
, niin on kääntyvä ja 
Esimerkki
Lasketaan matriisin  käänteismatriisi kahdella tavalla.
käänteismatriisi kahdella tavalla.
Jos on matriisin käänteismatriisi, niin on  Vastaavan yhtälöryhmä
Vastaavan yhtälöryhmä  hajoaa kahdeksi yhtälöryhmäksi
hajoaa kahdeksi yhtälöryhmäksi  ja
ja  jotka ratkaisemalla saadaan
jotka ratkaisemalla saadaan  ,
,  ,
,  ,
,  .
.
Siten on  .
.
Determinantin avulla käänteismatriisin laskeminen on helppoa. Koska  , niin
, niin 
Kun  , niin determinantti määritellään alimatriisien determinanttien avulla.
, niin determinantti määritellään alimatriisien determinanttien avulla.
 -matriisille on
-matriisille on  Summassa on kolmen matriisin alimatriisin determinantit: matriisi
Summassa on kolmen matriisin alimatriisin determinantit: matriisi  saadaan poistamalla matriisista . sarake ja . rivi. Näiden matriisien determinantit kerrotaan matriisin komponentilla vaihtuvin etumerkein eli
saadaan poistamalla matriisista . sarake ja . rivi. Näiden matriisien determinantit kerrotaan matriisin komponentilla vaihtuvin etumerkein eli 
Yleiselle -matriisille determinantti lasketaan samaan tapaan, ^{1+n}a_{1n}\det A_{1n}\\
&=\sum_{k=1}^na_{1k}(-1)^{1+k}\det A_{1k},
\end{aligned}") missä alimatriisi saadaan poistamalla matriisista . rivi ja . sarake.
missä alimatriisi saadaan poistamalla matriisista . rivi ja . sarake.
Determinantti voidaan laskea myös muun kuin ensimmäisen sarakkeen tai minkä tahansa rivin ja vastaavien alimatriisien avulla, ^{i+k}\det A_{ik}
=\sum_{k=1}^na_{kj}(-1)^{k+j}\det A_{kj}.") Jos matriisin joku rivi tai sarake sisältää pelkkiä nollia, niin laskemalla determinantti tämän rivin tai sarakkeen avulla nähdään, että determinantti on nolla.
Jos matriisin joku rivi tai sarake sisältää pelkkiä nollia, niin laskemalla determinantti tämän rivin tai sarakkeen avulla nähdään, että determinantti on nolla.
Jos on ylä- tai alakolmiomatriisi, erityisesti siis jos se on diagonaalimatriisi, niin determinantti on diagonaalialkioiden tulo 
Jos ja ovat -matriiseja, niin 
Kääntyvyydellä ja determinantilla on yhteys yleisilläkin neliömatriiseilla: -matriisi on kääntyvä jos ja vain jos . Tällöin 
Geometrisesti -matriisin  determinantti kertoo vektoreiden
determinantti kertoo vektoreiden ") ja
ja ") virittämän suunnikkaan pinta-alan ja vastaavasti -matriisin
virittämän suunnikkaan pinta-alan ja vastaavasti -matriisin  determinantti kertoo vektoreiden
determinantti kertoo vektoreiden ") ,
, ") ja
ja ") virittämän suuntaissärmiön tilavuuden.
virittämän suuntaissärmiön tilavuuden. 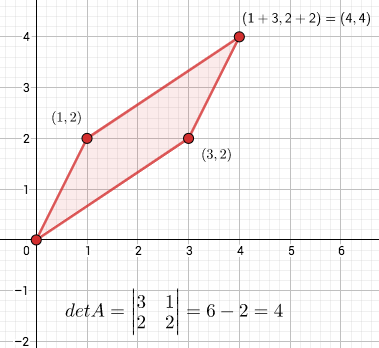
Esimerkki
Matriisin  determinantti on
determinantti on -5(4\cdot4-3\cdot(-1))+2(4\cdot2-2\cdot(-1)=-69.
\end{aligned}")
3.2.6 Harjoitustehtäviä
Todista kaava
 .
.Miksi käänteismatriisi määritellään vain neliömatriiseille?
Olkoon
kääntyvä neliömatriisi. Osoita, että käänteismatriisi on yksikäsitteinen. (Oleta, että matriisilla oli kaksi käänteismatriisia ja ja näytä, että on  .)
.)Näytä, että kaava
 antaa -matriisin käänteismatriisin.
antaa -matriisin käänteismatriisin.Olkoon
 . Onko kääntyvä? Jos on, niin etsi .
. Onko kääntyvä? Jos on, niin etsi .Olkoot
 ja
ja  . Laske matriisien ja determinantit.
. Laske matriisien ja determinantit.Todista determinantin tulokaava
-matriiseille.
Symmetriset matriisit ja ortogonaaliset matriisit
Joissain tilanteissa tarvitaan matriisia, jossa alkuperäisen matriisin rivit vaihdetaan sarakkeiksi ja päinvastoin eli matriisi heijastetaan diagonaalinsa suhteen.
Olkoon -matriisi. Matriisi ") ,
,  on matriisin transpoosi.
on matriisin transpoosi.
Jos on neliömatriisi eli ja  , niin on symmetrinen.
, niin on symmetrinen.




Rivivektorin ") transpoosi on sarakevektori, jolla on samat komponentit. Vastaavasti sarakevektorin transpoosi on rivivektori, jolla on samat komponentit kuin alkuperäisellä sarakevektorilla. Vektoreiden transpooseja käytetään erityisesti siihen, että vektoreiden ja matriisien väliset laskutoimitukset saadaan muodollisesti oikeiksi.
transpoosi on sarakevektori, jolla on samat komponentit. Vastaavasti sarakevektorin transpoosi on rivivektori, jolla on samat komponentit kuin alkuperäisellä sarakevektorilla. Vektoreiden transpooseja käytetään erityisesti siihen, että vektoreiden ja matriisien väliset laskutoimitukset saadaan muodollisesti oikeiksi.
Jos on -matriisi ja on -matriisi, niin transpooseille pätee ^T=A \quad\text{ja}\quad (AB)^T=B^TA^T.") Jos
Jos  , niin
, niin ^T=A^T+B^T.") Jos , niin
Jos , niin  Jos on kääntyvä, niin myös
Jos on kääntyvä, niin myös  on kääntyvä ja
on kääntyvä ja ^{-1}=(A^{-1})^T.")
Myöhemmin nähdään, että symmetrisillä matriiseilla on hyödyllisiä ominaisuuksia. Siksi niitä pyritään käyttämään matriisihajotelmissa.
Olkoon -matriisi. Matriisi on ortogonaalinen, jos on kääntyvä ja 
Ortogonaaliselle matriisille siis  . Matriisi on ortogonaalinen jos ja vain jos sen sarakevektorit
. Matriisi on ortogonaalinen jos ja vain jos sen sarakevektorit ^T") , , muodostavat ortonormaalin joukon.
, , muodostavat ortonormaalin joukon.
Olkoot  -ulotteisia vektoreita. Joukko
-ulotteisia vektoreita. Joukko  on ortonormaali, jos
on ortonormaali, jos  kaikilla
kaikilla  kun ja
kun ja  kaikilla (eli vektorit ovat kohtisuorassa toisiaan vastaan ja niiden pituus on .)
kaikilla (eli vektorit ovat kohtisuorassa toisiaan vastaan ja niiden pituus on .)
3.2.7 Harjoitustehtäviä
Olkoot
 Etsi matriisien ja ja tulon transpoosit. Onko tai symmetrinen?
Etsi matriisien ja ja tulon transpoosit. Onko tai symmetrinen?Olkoot
ja . Miten sisätulo  voidaan esittää transpoosien avulla?
voidaan esittää transpoosien avulla?Olkoon
-matriisi. Osoita, että ") on symmetrinen.
on symmetrinen.
Matriisit ja lineaariset yhtälöryhmät
Jatketaan yhtälön ja muuttujan yhtälöryhmän tarkastelua. Kun yhtälöiden kertoimista muodostetaan matriisi ja muuttujista ja yhtälöiden oikeista puolista vektorit,  niin yhtälöryhmä voidaan kirjoittaa muodossa
niin yhtälöryhmä voidaan kirjoittaa muodossa 
Jos yhtälöitä ja tuntemattomia on yhtä monta, kappaletta, niin on neliömatriisi. Jos matriisi on kääntyvä, niin yhtälöryhmän ratkaisu löydetään käänteismatriisin avulla. Käänteismatriisin ominaisuuksien perusteella on  eli yhtälöryhmällä
eli yhtälöryhmällä  on yksikäsitteinen ratkaisu jos ja vain jos matriisi on kääntyvä eli jos ja vain jos .
on yksikäsitteinen ratkaisu jos ja vain jos matriisi on kääntyvä eli jos ja vain jos .
Teoriassa yhtälöryhmän ratkaisu löydetään siis käänteismatriisin avulla mikäli se on olemassa. Käänteismatriisin laskeminen on kuitenkin raskasta, joten kääntämisen sijaan ratkaisussa käytetään erilaisia matriisihajotelmia.
Esimerkki
Yhtälöryhmää  vastaava matriisiyhtälö on , missä
vastaava matriisiyhtälö on , missä  Matriisi on kääntyvä, joten
Matriisi on kääntyvä, joten 
3.2.8 Harjoitustehtäviä
- Opiskele Gauss-Jordan menetelmä yhtälöryhmien ratkaisemiseksi.
3.2.9 Ominaisarvot ja ominaisvektorit
Olkoon -matriisi. Luku  (reaali- tai kompleksiluku) on matriisin ominaisarvo, jos on
(reaali- tai kompleksiluku) on matriisin ominaisarvo, jos on  , joka ei ole nollavektori, jolle
, joka ei ole nollavektori, jolle  Tällöin on ominaisarvoa vastaava ominaisvektori.
Tällöin on ominaisarvoa vastaava ominaisvektori.
Ominaisarvon ja -vektorin määritelmistä nähdään, että on matriisin ominaisarvo ja  vastaava ominaisvektori jos ja vain jos
vastaava ominaisvektori jos ja vain jos v=0") . Tällä yhtälöllä on nollavektorista poikkeava ratkaisu jos ja vain jos
. Tällä yhtälöllä on nollavektorista poikkeava ratkaisu jos ja vain jos = 0.") Yhtälöä
Yhtälöä = 0") sanotaan karakteristisekssi yhtälöksi ja sen vasenta puolta karakteristiseksi polynomiksi.
sanotaan karakteristisekssi yhtälöksi ja sen vasenta puolta karakteristiseksi polynomiksi.
Matriisin ominaisavot löydetään siis ratkaisemalla karakteristinen yhtälö. Algebran peruslause sanoo, että . asteen polynomilla on nollakohtaa kompleksilukujen joukossa. Siten karakteristisella polynomilla on juurta ja matriisilla ominaisarvoa, joista osa voi olla moninkertaisia.
Ominaisarvot ja -vektorit etsitään siis seuraavalla tavalla:
Muodosta karakteristinen yhtälö
=\det(A-\lambda I_n)") =0.
=0.Etsi ominaisarvot eli karakteristisen yhtälön juuret
 .
.Etsi ominaisarvoja
vastaavat ominaisvektorit ratkaisemalla yhtälöt v=0.")
Jos matriisilla on eri ominaisarvoa  ,
,  ,
,  , niin vastaavat ominaisvektorit
, niin vastaavat ominaisvektorit  ,
,  ,
,  ovat lineaarisesti riippumattomia.
ovat lineaarisesti riippumattomia.
Lineaarinen riippumattomuus tarkoittaa sitä, että jos on luvut  ,
,  ,
,  , joille
, joille  niin
niin  kaikilla . Tämä on yhtäpitävää sen kanssa, että vektoreista
kaikilla . Tämä on yhtäpitävää sen kanssa, että vektoreista  muodostetun matriisin determinantti ei ole nolla.
muodostetun matriisin determinantti ei ole nolla.
Esimerkki
Olkoon  Karakteristinen yhtälö on
Karakteristinen yhtälö on 
&=
\begin{vmatrix}
4-\lambda&2\\
3&3-\lambda
\end{vmatrix}\\
&=(4-\lambda)(3-\lambda)-6\\
&=\lambda^2-7\lambda+6=0.
\end{aligned}") Sen ratkaisut ovat
Sen ratkaisut ovat  eli matriisin ominaisarvot ovat
eli matriisin ominaisarvot ovat  ja
ja  .
.
Ominaisarvoa vastaava ominaisvektori toteuttaa yhtälön v=0") eli
eli  Ominaisvektoreita ovat siis vektorit
Ominaisvektoreita ovat siis vektorit ") , joille
, joille  , esimerkiksi
, esimerkiksi ") .
.
Ominaisarvoa vastaava ominaisvektori toteuttaa yhtälön v=0") eli
eli  Ominaisvektoreita ovat siis vektorit , joille
Ominaisvektoreita ovat siis vektorit , joille  , esimerkiksi .
, esimerkiksi .
3.2.10 Harjoitustehtäviä
- Etsi matriisien
 ja
ja  ominaisarvot ja -vektorit.
ominaisarvot ja -vektorit.
3.2.11 Matriisihajotelmia
Matriisit pyritään monesti esittämään kahden tai kolmen matriisin tulona, jossa tulon matriisit ovat symmetrisiä tai diagonaali- tai kolmiomatriiseja. Esimerkiksi yhtälöryhmiä ratkaisevat ja käänteismatriiseja tai determinantteja laskevat algoritmit tehdään hajotelmien avulla.
LU-hajotelma
LU-hajotelmassa neliömatriisi esitetään ala- ja yläkolmiomatriisien tulona  , missä alakolmiomatriisin diagonaalialkiot ovat ykkösiä.
, missä alakolmiomatriisin diagonaalialkiot ovat ykkösiä. 
"LU-hajotelmassa neliömatriisi esitetään ala- ja yläkolmiomatriisien tulona A=LUA=LUA=LU, missä alakolmiomatriisin LLL diagonaalialkiot ovat nollia." tulisi olla "LU-hajotelmassa neliömatriisi esitetään ala- ja yläkolmiomatriisien tulona A=LUA=LUA=LU, missä alakolmiomatriisin LLL diagonaalialkiot ovat ykkösiä. "
—Ykkösiä pitää olla. Kiitos.
—Jokaisella kääntyvällä matriisilla on LU-hajotelma mutta matriisille joudutaan joskus tekemään rivioperaatioita ennen hajotelmaa: Huomaa, että koska  , niin jos
, niin jos  , niin joko
, niin joko  tai
tai  . Koska kolmiomatriisin determinantti on diagonaalialkioden tulo, niin tästä seuraa, että joko
. Koska kolmiomatriisin determinantti on diagonaalialkioden tulo, niin tästä seuraa, että joko  tai
tai  . Siten olisi
. Siten olisi  . Kuitenkin kääntyvälle matriisille on mutta voi olla .
. Kuitenkin kääntyvälle matriisille on mutta voi olla .
Esimerkki
Etsitään matriisin  LU-hajotelma eli matriisit ja
LU-hajotelma eli matriisit ja  , joille
, joille  Vastaava yhtälöryhmä on
Vastaava yhtälöryhmä on  ja sen ratkaisu
ja sen ratkaisu  ,
,  ,
,  ,
,  .
.
Siten 
3.2.12 Harjoitustehtäviä
- Olkoon
 . Etsi matriisin
. Etsi matriisin  -hajotelma.
-hajotelma.
Lisätietoa lineaarialgebrasta
Lineaarisen yhtälöryhmän ratkaiseminen (Approbatur 1 A, JYU)
Vectors, what even are they? | Essence of linear algebra, chapter 1, 3Blue1Brown
Linear combinations, span, and basis vectors | Essence of linear algebra, chapter 2, 3Blue1Brown
Linear transformations and matrices | Essence of linear algebra, chapter 3, 3Blue1Brown
Matrix multiplication as composition | Essence of linear algebra, chapter 4, 3Blue1Brown
The determinant | Essence of linear algebra, chapter 5, 3Blue1Brown
Inverse matrices, column space and null space | Essence of linear algebra, chapter 6, 3Blue1Brown
Eigenvectors and eigenvalues | Essence of linear algebra, chapter 10, 3Blue1Brown
Visualizing the chain rule and product rule | Chapter 4, Essence of calculus, 3Blue1Brown
3.3 Harjoitustehtäviä Pythonilla
Kurssin yhteydessä tutustutaan myös Python-kieleen ja sen matematiikkaan liittyviin kirjastoihin.
Lineaarialgebraa NumPyn avulla
Käy läpi NumPy-kirjaston lineaarialgebran rutiineja.
Ota NumPy käyttöön komennolla
import numpy tai kaikki rutiinit komennolla
from numpy import *Edellisessä tapauksessa rutiineja käytettäessä rutiiniin nimen eteen pitää lisätä numpy. jälkimmäisessä riittää pelkkä rutiinin nimi. Esimerkiksi alla ensimmäisessä tehtävässä numpy.dot(u,v)tai dot(u,v).
Ota lineaarialgebrarutiinit käyttöön komennolla
from numpy import linalgJos haluat käyttää harjoituksissa lyhyempiä komentoja, joissa linalg-osan voi korvata haluamallaan kirjainyhdistelmällä, niin ota rutiinit käyttöön esimerkiksi komennolla
from numpy import linalg as lajolloin esimerkiksi 6. tehtävän komento on la.norm(v).
Ohjeita löytyy SciPy-sivulta.
Tehtävissä on tarkoituksella sellaiset matriisit ja vektorit, että tulokset on helppo laskea paperillakin. Kokeile eri toimintoihin suurempiakin matriiseja.
3.3.1 Harjoitustehtäviä
- Laske vektoreiden
") ja
ja ") sisätulo.
sisätulo. numpy.dot(u,v) dot(u,v) - Laske matriisien
 ja
ja  tulo.
tulo.
```
A=numpy.array([[1,2],[3,1]])
...
numpy.dot(A,B)
```- Laske edellisen tehtävän matriisin kolmas potenssi.
```
linalg.matrix_power(A,3)
```- Etsi matriisin
 käänteismatriisi ja determinantti.
käänteismatriisi ja determinantti.
```
linalg.inv(A)
linalg.det(A)
```Laske matriisin
 transpoosi.
transpoosi. numpy.transpose(A)Laske vektorin
") ja matriisin
ja matriisin  normit. Ilman parametrja lasketaan standardinormi eli komponenttien itseisarvojen neliöiden summan neliöjuuri.
normit. Ilman parametrja lasketaan standardinormi eli komponenttien itseisarvojen neliöiden summan neliöjuuri.
```
linalg.norm(v)
linalg.norm(A)
```
Parametreilla saadaan selville esimerkiksi vektorin itseisarvoltaan suurin
komponetti ja matriisin suurin rivien itseisarvojen summa.
```
linalg.norm(v,numpy.inf)
linalg.norm(A,numpy.inf)
```- Luo nollamatriisi,
 pelkkiä ykkösiä sisältävä matriisi,
pelkkiä ykkösiä sisältävä matriisi,  pelkkiä ykkösiä kokonaislukuina sisältävä matriisi sekä
pelkkiä ykkösiä kokonaislukuina sisältävä matriisi sekä  yksikkömatriisi.
yksikkömatriisi.
```
numpy.zeros((3,4))
numpy.ones((5,4))
numpy.ones((4,5),dtype=numpy.int)
numpy.matlib.identity(5)
```Laske matriisin
 ominaisarvot ja vastaavat ominaisvektorit.
ominaisarvot ja vastaavat ominaisvektorit. linalg.eig(A)Ratkaise yhtälöryhmä
 Yhtälöryhmää vastaava matriisiyhtälö on , missä
Yhtälöryhmää vastaava matriisiyhtälö on , missä  ja
ja  .
. numpy.linalg.solve(A,b)Opiskele pienimmän neliösumman esimerkki ja etsi sitä muokkaamalla pienimmän neliösumman suora pistepareille
") ,
, ") ,
, ") ja
ja ")
Lineaarialgebraa SymPyn avulla
Käy läpi symbolisen matematiikan kirjaston SymPyn lineaarialgebran rutiineja. Ota SymPy käyttöön komennolla
import sympy tai kaikki rutiinit komennolla
from sympy import *Edellisessä tapauksessa rutiineja käytettäessä rutiiniin nimen eteen pitää lisätä numpy. jälkimmäisessä riittää pelkkä rutiinin nimi.
3.3.2 Harjoitustehtäviä
Luo matriisi
 sekä riveittäin että rivi- ja sarakekokojen avulla.
sekä riveittäin että rivi- ja sarakekokojen avulla.Matrix([[1,2,3],[4,5,6]]) Matrix(2,3,[1,2,3,4,5,6])Luo
nollamatriisi, vain ykkösiä sisältävä matriisi, yksikkömatriisi ja diagonaalimatriisi, jonka diagonaalilla ovat luvut  .
.
```
zeros(2,3)
ones(5,4)
eye(5)
diag(1,2,3,4,5)
```Laske matriisien
ja  tulo.
tulo. A*BPyydä äskeisen tehtävän matriisin
rivejä ja sarakkeita (ensimmäinen 0, viimeinen -1). A.row(0) A.col(0)Poista ja lisää edellisien tehtävien matriisista rivejä ja sarakkeita. Palauta alkuperäinen matriisi poistamisten jälkeen tai muuta tarvittaessa lisäystehtävien dimensioita. Huomaa, että lisäykset eivät muuta alkuperäistä matriisia.
```
A.row_del(0)
A.col_del(0)
A.row_insert(1,Matrix([[0,1,1]]))
A.col_insert(1,Matrix([[0],[1]]))
```- Laske matriisien
 ja
ja  tulo ja summa.
tulo ja summa.
```
a,b,c,d,e,f,g,h=symbols('a b c d e f g h')
A=Matrix([[a,b],[c,d]])
```- Laske edellisen tehtävän matriisin tulo itsensä kanssa, käänteismatriisi ja determinantti.
```
A**2
A**-1
A.det()
```Laske matriisin
 transpoosi.
transpoosi. A.TMuunna matriisi
 Gauss-Jordan menetelmässä tavoiteltuun muotoon (reduced row echelon form).
Gauss-Jordan menetelmässä tavoiteltuun muotoon (reduced row echelon form).
```
A.rref()
```- Laske matriisin
 ominaisarvot ja niiden kertaluvut, ominaisvektorit ja karakteristinen polynomi.
ominaisarvot ja niiden kertaluvut, ominaisvektorit ja karakteristinen polynomi.
```
A.charpoly()
A.eigenvals()
A.eigenvects()
lamda=symbols('lamda')
p=A.charpoly(lamda)
factor(p)
```- Diagonalisoi edellisen tehtävän matriisi eli etsi diagonaalimatriisi
 ja matriisi , joille
ja matriisi , joille  . Muista matriisien ja yhteys ominaisarvoihin ja -vektoreihin.
. Muista matriisien ja yhteys ominaisarvoihin ja -vektoreihin.
```
P,D=A.diagonalize()
```Matrix(2,3[1,2,3,4,5,6]) on väärin, ei voi ottaa hakasulkeilla 3:sta mitään. Pitäisi olla Matrix(2,3,[1,2,3,4,5,6])
—Kiitos!
—Analyysia SymPyn avulla
Harjoittele SymPyn analyysiin liittyviä rutiineja. Kokeile rutiineja muihinkin kuin tehtävissä mainittuihin funktioihin ja yhtälöihin ja tutustu rutiineihin liittyvään dokumentaatioon. Ota SymPyn rutiinit käyttöön komennolla
from sympy import *SymPy-kirjastoa voi testata myös SymPy Liven avulla. Siinä SymPy toimii Google App Enginen avulla.
3.3.3 Harjoitustehtäviä
Symbolisen ja numeerisen laskennan ero: Vertaa Pythonin
math-kirjaston ja SymPyn neliöjuurifunktioiden toimintaa. Otamath-kirjasto käyttöön komennollaimport math. Testaa komentojamath.sqrt(8)jasympy.sqrt(8)symbols, *, expand, factor: Tarkastele SymPyn laskutoimituksia ja symbolisten lausekkeiden käsittelyä. Esittele symboliset muuttujat ja testaa laskuja ja tekijöihin jakoa.x,y,z=symbols('x y z') a=2*x+y-z a-y y*a ea=expand(y*a) ea factor(ea)simplify, exp, : Harjoittele lausekkeiden sieventämistä.simplify((x**2-x-2)/(x-2)) simplify((x-1)*(x+1)) simplify(exp(x)*exp(y))diff: Laske funktioiden, ja , =cos(2x), \quad g(x)=x^3y+4x^2+3x, \quad h(x)=e^{x^4}") derivaatat.
derivaatat. h=exp(x**4) diff(h,x)Osittaisderivaatat: Laske esimerkin funktion
(osittais)derivaatta muuttujan suhteen. Osittaisderivaatat: Laske funktioiden
, , , =e^{xyz},\quad g(x,y)=3x^2+x^2y-4xy, \quad h(x,y,z)=\frac{1}{x^2+y^2+1}+z^3x") osittaisderivaatat muuttujien , ja suhteen.
osittaisderivaatat muuttujien , ja suhteen.limit: Laske edellisen tehtävän funktioiden raja-arvoja, esimerkiksi,\quad \lim_{y\to1}f(x,y,z),\quad \lim_{y\to0}g(x,y),\quad \lim_{y\to\infty}h(x,y,z).")
limit(f,x,0)Huomaa, että ääretön kirjoitetaan kahdella pienellä o-kirjaimella "oo".
kirjoitetaan kahdella pienellä o-kirjaimella "oo".solveset: Harjoittele yhtälöitä algebrallista ratkaisemista. Ratkaise toisen asteen yhtälö sekä yhtälöt
sekä yhtälöt  ja
ja  .
. solveset(x**2+x-2,x) solveset(exp(x)-1,x,domain=S.Reals)Huomaa, että oletuksena yhtälön oikea puoli on. solveset(x**2+x-2,x)on sama kuinsolveset(Eq(x**2+x-2,0),x)Piirtäminen: Harjoittele 2- ja 3-ulotteisten funktioiden kuvaajien piirtämistä. Piirrä sigmoid-funktio ja funktiot
ja =x^2-y^2") . Testaa piirtämiseen liittyviä parametreja.
. Testaa piirtämiseen liittyviä parametreja. plot((1+exp(-x))**(-1),(x,-4,4),axis_center='center') plotting.plot3d(f,(x,-1,1),(y,-1,1)) plotting.plot3d(g,(x,-1,1),(y,-1,1)) plotting.plot3d(f,g,(x,-1,1),(y,-1,1))
These are the current permissions for this document; please modify if needed. You can always modify these permissions from the manage page.